রেডিও-নিয়ন্ত্রিত গাড়িতে কীভাবে অন্য রিমোট কন্ট্রোল সেট আপ করবেন। একটি রেডিও নিয়ন্ত্রিত গাড়ির ফ্রিকোয়েন্সি কিভাবে পরিবর্তন করবেন? রেডিও কন্ট্রোলের জগতে বিপ্লবীরা - আপনার গাড়ির জন্য সেরা রিমোট
তারিখ: 03/28/2016 // 0 মন্তব্য
কখনও কখনও একটি ছোট শিশুর জন্য সবচেয়ে নিরীহ উপহার তাকে খুব বিরক্ত করতে পারে। একটি রেডিও-নিয়ন্ত্রিত গাড়ি কেনার পরে, অনেকেই মনে করেন না যে এই খেলনাগুলির বেশিরভাগ একই ফ্রিকোয়েন্সিতে কাজ করে। এবং যদি শিশুর ইতিমধ্যেই একটি অনুরূপ খেলনা থাকে, তাহলে একটি ছোট ঘটনা ঘটতে পারে, মেশিনটি একটি অ-নেটিভ রিমোট কন্ট্রোলে সাড়া দেবে। যদি পরিবারে দুটি সন্তান থাকে এবং রেডিও-নিয়ন্ত্রিত গাড়ির ফ্রিকোয়েন্সি একই হয়, তাহলে ধ্রুবক তাণ্ডব নিশ্চিত করা হবে। একটি পাল্টা প্রশ্ন উঠছে, কীভাবে রিমোট কন্ট্রোলের ফ্রিকোয়েন্সি এবং চীনা রেডিও-নিয়ন্ত্রিত গাড়ির মডেলগুলি পরিবর্তন করবেন? আজ আমরা একটি অনুরূপ সমস্যা সমাধান করার চেষ্টা করব এবং আপনাকে বলব কিভাবে রেডিও-নিয়ন্ত্রিত গাড়ির ফ্রিকোয়েন্সি পরিবর্তন করতে হয়।
ফ্রিকোয়েন্সি টিউনিংয়ের আগে আপনাকে তিনটি জিনিস করতে হবে:
- নিশ্চিত করুন যে শিশুটি আপনাকে যথেষ্ট অনুপ্রাণিত করেছে, কারণ অভিজ্ঞতা এবং সরাসরি হাত ছাড়া, পুনর্গঠন কাজ নাও করতে পারে, তবে একটি শিশু ক্ষতিগ্রস্ত টাইপরাইটারে খুশি হওয়ার সম্ভাবনা কম।
- নিশ্চিত করুন যে কয়েলটি রিমোট কন্ট্রোলে ইনস্টল করা আছে। এমন কনসোল রয়েছে যেখানে একটি কয়েলের পরিবর্তে ইনস্টল করা আছে কোয়ার্টজ অনুরণনকারী. এই জাতীয় কিট পরিবর্তন করার সময়, সেটটির তুলনায় নিকটতম সম্ভাব্য ফ্রিকোয়েন্সি সহ কোয়ার্টজ প্রতিস্থাপন করা প্রয়োজন। যদি নতুন কোয়ার্টজের ফ্রিকোয়েন্সি খুব আলাদা হয়, তবে সম্ভবত মডেলটি রিমোট কন্ট্রোলের নতুন ফ্রিকোয়েন্সি ধরতে সক্ষম হবে না। সম্ভবত একটি নতুন কোয়ার্টজ নির্বাচনের জন্য অনুসন্ধানের সাথে সমস্যা হবে। ব্যাপারটা খারাপ।
- আপনি যদি এখনও মেশিনের ফ্রিকোয়েন্সি পরিবর্তন করার সিদ্ধান্ত নেন তবে আপনাকে রিমোট কন্ট্রোল থেকে মেশিনের সর্বোচ্চ পরিসীমা পরিমাপ করতে হবে (এটি প্রায় 25-35 মি হবে)।
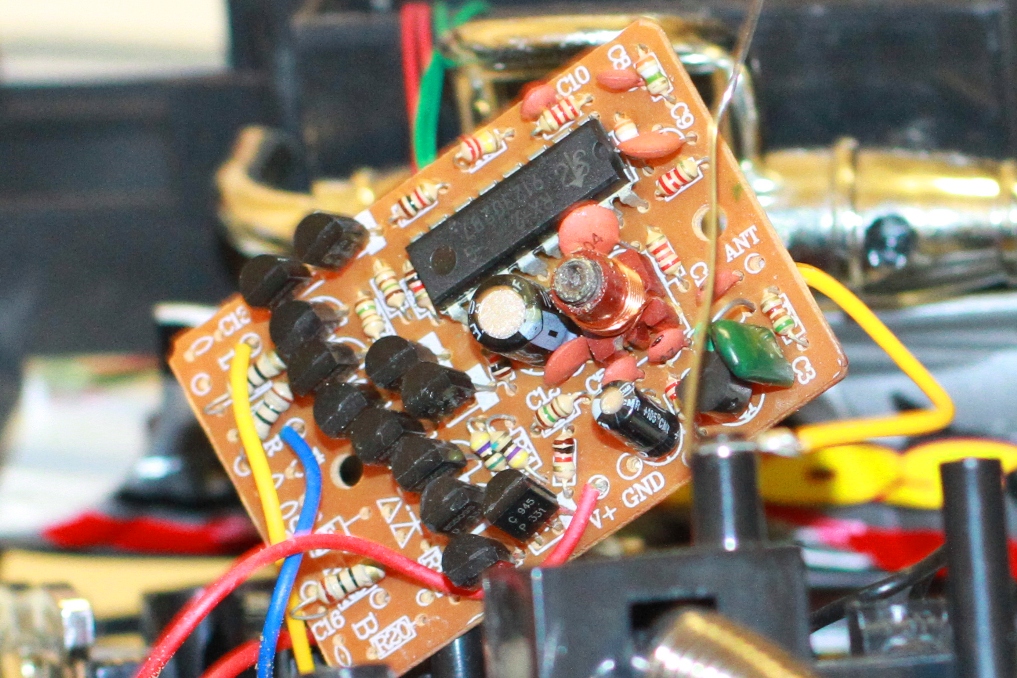
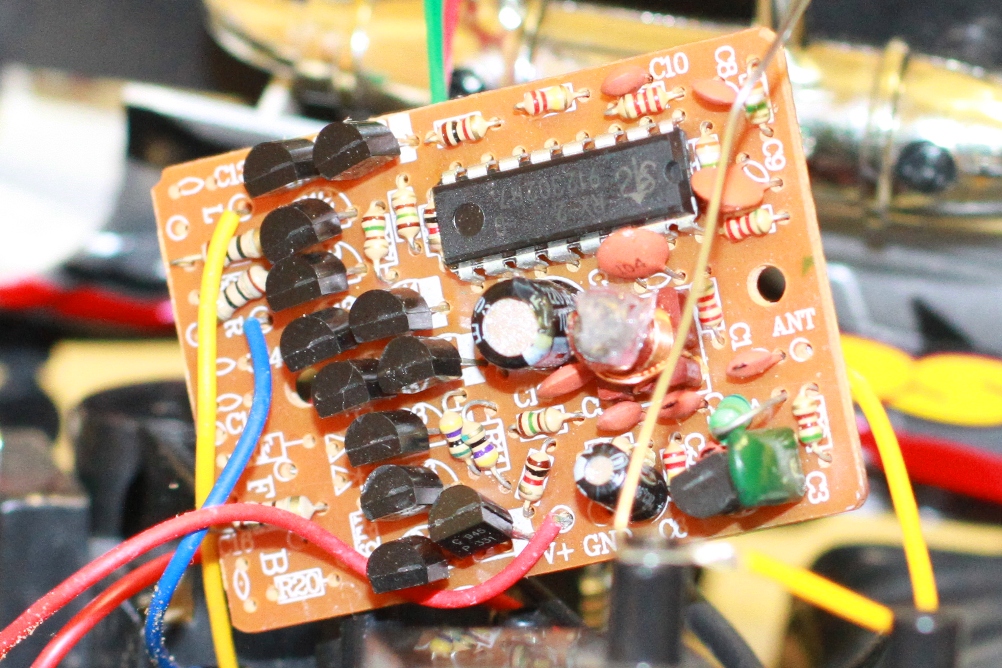
বিশেষ সরঞ্জাম ছাড়াই চীনা টাইপরাইটারের ফ্রিকোয়েন্সি টিউন করা একটি সূক্ষ্ম বিষয় এবং ধৈর্য এবং একটু সময় প্রয়োজন। প্রথমত, আমরা রেডিও-নিয়ন্ত্রিত মেশিনটি খুলি এবং বোর্ডে মোম বা প্যারাফিন দিয়ে ভরা একটি কয়েল খুঁজে পাই।

যতক্ষণ না মেশিন কাছাকাছি রিমোট কন্ট্রোল থেকে সংকেতগুলিতে সাড়া দেওয়া বন্ধ না করে ততক্ষণ আমরা কোরটি খুলে ফেলি।

আমরা ফরওয়ার্ড বোতামটি ঠিক করি এবং মেশিনটি রিমোট কন্ট্রোল সিগন্যালে প্রতিক্রিয়া না জানানোর মুহূর্ত পর্যন্ত খুব মসৃণভাবে রিমোট কন্ট্রোল কয়েলের মূলটি খুলে ফেলি। তারপরে আমরা 3-5 মিটার দূরত্বে মেশিন থেকে একটু দূরে সরে যাই। সম্ভবত এখন এত দূরত্বে থাকা মেশিনটি রিমোট কন্ট্রোলে সাড়া দেবে না, আমরা খুব ধীরে ধীরে কোরটি খুলতে থাকি।
আমরা 3-5 মিটার দূরত্বে স্থিতিশীল অপারেশন অর্জন করি, একইভাবে আমরা ধীরে ধীরে দূরত্ব বাড়িয়ে 20 মিটার করি। যখন মেশিনটি 20m দূরত্বে অবিচলিতভাবে কাজ করে, তখন সিলিকন দিয়ে মেশিনের বোর্ডে কয়েলটি পূরণ করুন। এবং আমরা মডেল একত্রিত.
আমরা খুব মসৃণভাবে সমস্ত কয়েল সামঞ্জস্য করি, কোরের উপর চাপ দিই না। কয়েলের প্লাস্টিক খুব নরম এবং কোরটি সহজেই ভিতরে পড়তে পারে।
এটি রেডিও-নিয়ন্ত্রিত গাড়ির ফ্রিকোয়েন্সি পরিবর্তন সম্পূর্ণ করে। এটি লক্ষ করা উচিত যে এইভাবে এটি একাধিক জোড়া গাড়ি সামঞ্জস্য করতে সক্ষম হওয়ার সম্ভাবনা কম।
ইদানীং ঘন ঘন হয়ে উঠেছে স্প্যাম, যেতে না সন্দেহজনক লিঙ্কমন্তব্যে, স্ক্যামারদের আপনার উপর অর্থোপার্জনের কারণ দেবেন না। আমরা একটি আরও কার্যকর স্প্যাম ফিল্টার নিয়ে কাজ করছি, আমাদের সংস্থানগুলিতে মন্তব্য সর্বদা খোলা থাকবে!
চীনা Xedain মেমরি কার্ডের একটি সংক্ষিপ্ত ওভারভিউ এবং গতি পরীক্ষা। 10 ডলারে একটি ফ্ল্যাশ ড্রাইভ কেনার সময় আপনি কী আশা করতে পারেন?
এর জন্য ডেল্টা DPS-2000BB রূপান্তর বিকল্প আউটপুট ভোল্টেজ 14.4V একটি শক্তিশালী গাড়ী amp পাওয়ার জন্য।
সস্তা বর্তমান clamps একটি ছোট ওভারভিউ সরাসরি বর্তমান UNI-T UT203। পরীক্ষার সময় তারা কেমন আচরণ করবে?
ছোট নির্বাচন। সাধারণ এবং সাধারণ কম্পিউটার ব্লক ডায়াগ্রাম ATX পাওয়ার সাপ্লাই. এই পর্যায়ে, নির্বাচন সম্পূর্ণ নয় এবং ক্রমাগত আপডেট করা হবে।
একটি Motorola MBP 11 বেবি মনিটরে ব্যাটারি নির্বাচন এবং প্রতিস্থাপনের একটি উদাহরণ
মোবাইল মডেলের রিমোট কন্ট্রোল একটি ব্যক্তি এবং একটি মডেলের মিথস্ক্রিয়া উপর ভিত্তি করে। পাইলট মহাকাশে মডেলটির অবস্থান এবং এর গতি দেখেন। রিমোট কন্ট্রোল সরঞ্জামের সাহায্যে, তিনি মডেলের অ্যাকুয়েটরদের আদেশ দেন, যা রাডারগুলিকে ঘুরিয়ে দেয় বা ইঞ্জিনগুলিকে নিয়ন্ত্রণ করে, যার ফলে পাইলট তার ইচ্ছা অনুসারে মডেলের অবস্থান এবং দিক পরিবর্তন করে। পাইলট থেকে মডেলে কমান্ডের ট্রান্সমিশন বেশিরভাগই বাতাসের উপর দিয়ে ঘটে। একটি ব্যতিক্রম শুধুমাত্র ইনডোর মডেলগুলির জন্য পাওয়া যেতে পারে, যেখানে রেডিওর সাথে ইনফ্রারেড বিকিরণ ব্যবহার করা হয় এবং আল্ট্রাসাউন্ডও খুব কমই পানির নিচের যানবাহন নিয়ন্ত্রণ করতে ব্যবহৃত হয়।
রেডিও কন্ট্রোল ইকুইপমেন্টে একটি ট্রান্সমিটার থাকে, যা পাইলটে অবস্থিত এবং রিসিভার এবং অ্যাকচুয়েটরদের মডেলে স্থাপন করা হয়। এই নিবন্ধটি আপনাকে একটি ট্রান্সমিটার কীভাবে কাজ করে এবং আপনার কী ধরণের ট্রান্সমিটার প্রয়োজন সে সম্পর্কে ধারণা পেতে সহায়তা করবে।
গঠনমূলক ধরনের ট্রান্সমিটার
নিয়ন্ত্রণগুলির নকশা অনুসারে, যা প্রকৃতপক্ষে, পাইলটের আঙ্গুলগুলি কাজ করে, ট্রান্সমিটারগুলি জয়স্টিক এবং পিস্তলের প্রকারে বিভক্ত। প্রথমটিতে, একটি নিয়ম হিসাবে, দুটি দ্বি-সমন্বয় জয়স্টিক ইনস্টল করা হয়। এই ধরনের ট্রান্সমিটার উড়ন্ত মডেল নিয়ন্ত্রণ করতে ব্যবহৃত হয়। জয়স্টিক ট্রান্সমিটারে, হ্যান্ডেলটিতে অন্তর্নির্মিত স্প্রিংস থাকে যা ছেড়ে দিলে এটিকে নিরপেক্ষ অবস্থানে ফিরিয়ে দেয়। একটি নিয়ম হিসাবে, ট্র্যাকশন মোটর নিয়ন্ত্রণ করতে কিছু ধরণের জয়স্টিকের একটি দিক ব্যবহার করা হয় - এটির রিটার্ন স্প্রিং নেই। এই ক্ষেত্রে, হ্যান্ডেলটি একটি র্যাচেট (বিমানগুলির জন্য) বা একটি মসৃণ ব্রেকিং প্লেট (হেলিকপ্টারের জন্য) দিয়ে চাপানো হয়। এই জাতীয় ট্রান্সমিটারগুলির সাহায্যে, ভাসমান এবং ড্রাইভিং মডেলগুলিকে সফলভাবে নিয়ন্ত্রণ করাও সম্ভব, তবে তাদের জন্য বিশেষ পিস্তল-টাইপ ট্রান্সমিটার উদ্ভাবন করা হয়েছে। এখানে, স্টিয়ারিং হুইল মডেলের দিক নিয়ন্ত্রণ করে, যখন ট্রিগার তার ইঞ্জিন এবং ব্রেক নিয়ন্ত্রণ করে।
|
|

সাম্প্রতিক বছরগুলিতে, একটি একক XY জয়স্টিক সহ ট্রান্সমিটার উপস্থিত হয়েছে। এগুলি সস্তা ডিভাইসের বিভাগের অন্তর্গত এবং সরলীকৃত উড়ন্ত এবং স্থল সরঞ্জাম উভয়ই নিয়ন্ত্রণ করতে ব্যবহার করা যেতে পারে। এগুলি কেবলমাত্র প্রাথমিক স্তরে উত্পাদনশীলভাবে ব্যবহার করা যেতে পারে। দুটি একক-সমন্বয়কারী জয়স্টিক সহ ট্রান্সমিটারগুলির জন্য একই উদ্দেশ্য:
|
|
|


গঠনমূলক জাতগুলি দিয়ে শেষ করতে, আসুন জয়স্টিক ট্রান্সমিটারগুলির আরও একটি বিভাগকে মনোব্লক এবং মডুলারগুলিতে যুক্ত করি। যদি প্রথমগুলি সমস্ত উপাদানগুলির সাথে সম্পূর্ণরূপে সজ্জিত হয় এবং অবিলম্বে ব্যবহারের জন্য প্রস্তুত হয়, তবে মডুলারগুলি হল ভিত্তি যার মধ্যে পাইলট, তার নিজস্ব বিবেচনার ভিত্তিতে, তার প্রয়োজনীয় অতিরিক্ত নিয়ন্ত্রণগুলি যোগ করে:

ট্রান্সমিটার ধরে রাখার দুটি উপায় রয়েছে। একটি বিশেষ বেল্ট বা স্ট্যান্ড ব্যবহার করে পাইলটের গলায় রিমোট ট্রান্সমিটার ঝুলানো হয়। পাইলটের হাত ট্রান্সমিটারের শরীরের উপর বিশ্রাম, এবং প্রতিটি জয়স্টিক দুটি আঙ্গুল দ্বারা নিয়ন্ত্রিত হয় - তর্জনী এবং থাম্ব। এটি তথাকথিত ইউরোপীয় স্কুল। পাইলট তার হাতে হ্যান্ডহেল্ড ট্রান্সমিটার ধরে রাখে এবং প্রতিটি জয়স্টিক একটি থাম্ব দ্বারা নিয়ন্ত্রিত হয়। এই শৈলী আমেরিকান স্কুলের অন্তর্গত।
|
|
|


হ্যান্ডহেল্ড ট্রান্সমিটারটি আপনার হাতে ধরে রাখা যেতে পারে এবং ইউরোপীয় উপায়ে নিয়ন্ত্রিত হতে পারে। আপনি যদি এটির জন্য একটি বিশেষ টেবিল-স্ট্যান্ড কিনে থাকেন তবে আপনি এটি দূরবর্তী সংস্করণেও ব্যবহার করতে পারেন। আপনি নিজেই একটি ব্র্যান্ডেডের চেয়ে খারাপ একটি টেবিল তৈরি করতে পারেন। কিছু কনসোল ট্রান্সমিটারের জন্যও এই টেবিলগুলি প্রয়োজন। কোন স্টাইলটি আমাদের কাছে বেশি সাধারণ তা নির্ভর করে পাইলটের বয়সের উপর। তরুণরা, আমাদের পর্যবেক্ষণ অনুসারে, আমেরিকান রীতিনীতির প্রতি বেশি ঝুঁকছে, এবং বয়স্ক প্রজন্ম - ইউরোপের রক্ষণশীলতার দিকে।
চ্যানেল সংখ্যা এবং নিয়ন্ত্রণ knobs বিন্যাস
চলন্ত মডেল নিয়ন্ত্রণ করতে, একাধিক ফাংশন একযোগে কাজ করা আবশ্যক. অতএব, রেডিও নিয়ন্ত্রণ ট্রান্সমিটার মাল্টি-চ্যানেল করা হয়. চ্যানেলের সংখ্যা এবং উদ্দেশ্য বিবেচনা করুন।
গাড়ি এবং জাহাজের মডেলগুলির জন্য, দুটি চ্যানেলের প্রয়োজন: চলাচলের দিক নিয়ন্ত্রণ এবং ইঞ্জিনের গতি। হেপড পিস্তল ট্রান্সমিটারগুলির একটি তৃতীয় চ্যানেলও রয়েছে যা অভ্যন্তরীণ জ্বলন ইঞ্জিন (রেডিও সুই) এর মিশ্রণ গঠন নিয়ন্ত্রণ করতে ব্যবহার করা যেতে পারে।
সহজতম উড়ন্ত মডেলগুলি নিয়ন্ত্রণ করতে, দুটি চ্যানেলও ব্যবহার করা যেতে পারে: গ্লাইডার এবং এরোপ্লেনগুলির জন্য লিফট এবং আইলারন, বা লিফট এবং রুডার। হ্যাং গ্লাইডারের জন্য, রোল এবং ইঞ্জিন পাওয়ার কন্ট্রোল ব্যবহার করা হয়। এছাড়াও, এই স্কিমটি কিছু সহজ গ্লাইডারগুলিতে ব্যবহৃত হয় - রাডার এবং ইঞ্জিন চালু করা। এই দুই-চ্যানেল ট্রান্সমিটার পার্ক মডেল এবং এন্ট্রি-লেভেল বৈদ্যুতিক বিমানের জন্য ব্যবহার করা যেতে পারে। যাইহোক, একটি বিমানের সম্পূর্ণ নিয়ন্ত্রণের জন্য, কমপক্ষে চারটি চ্যানেল প্রয়োজন, এবং একটি হেলিকপ্টারের জন্য - পাঁচটি চ্যানেল। বিমানের জন্য, দুটি দ্বি-সমন্বয়কারী জয়স্টিক লিফট, দিকনির্দেশ, আইলরন এবং ইঞ্জিন থ্রোটল ফাংশন নিয়ন্ত্রণ করে। জয়স্টিকগুলির জন্য ফাংশনগুলির নির্দিষ্ট বিন্যাস দুটি ধরণের: মোড 1 - বাম দিকে উল্লম্বভাবে লিফট এবং অনুভূমিকভাবে রুডার, ডানে উল্লম্বভাবে গ্যাস এবং অনুভূমিকভাবে রোল; মোড 2 - থ্রোটল বাম উল্লম্ব এবং রুডার অনুভূমিক, লিফট ডান উল্লম্ব এবং রোল অনুভূমিক। এছাড়াও মোড 3 এবং 4 আছে, কিন্তু তারা খুব সাধারণ নয়।
|
|
|


|
|
|


মোড 1 কে দুই হাতের বিকল্পও বলা হয়, এবং মোড 2 কে এক-হাতে বিকল্প বলা হয়। এই নামগুলি এই সত্য থেকে অনুসরণ করা হয়েছে যে পরবর্তী সংস্করণে, আপনি এক হাতে বিয়ারের ক্যান ধরে রেখে বেশ দীর্ঘ সময় ধরে বিমানটি উড়তে পারেন। এক বা অন্য প্রকল্পের সুবিধা সম্পর্কে মডেলারদের বিরোধ বহু বছর ধরে কমেনি। লেখকদের কাছে, এই বিরোধগুলি শ্যামাঙ্গিনীগুলির উপর স্বর্ণকেশীগুলির সুবিধার বিষয়ে আলোচনার স্মরণ করিয়ে দেয়। যাই হোক না কেন, বেশিরভাগ ট্রান্সমিটার সহজেই এক লেআউট থেকে অন্য লেআউটে পুনরায় কনফিগার করা হয়।
হেলিকপ্টারের কার্যকর নিয়ন্ত্রণের জন্য, ইতিমধ্যে পাঁচটি চ্যানেল প্রয়োজন (জাইরোস্কোপ সংবেদনশীলতা নিয়ন্ত্রণের জন্য চ্যানেল গণনা করা হচ্ছে না)। এখানে জয়স্টিকের এক দিকের জন্য দুটি ফাংশনের সংমিশ্রণ রয়েছে (এটি কীভাবে ঘটে, আমরা পরে বিবেচনা করব)। হ্যান্ডেলগুলির বিন্যাস মূলত বিমানের মতো। বৈশিষ্ট্যগুলির মধ্যে রয়েছে থ্রোটল স্টিক, যা কিছু পাইলট উল্টে দেয় (সর্বনিম্ন থ্রটল - শীর্ষে, সর্বাধিক - নীচে), কারণ তারা এটিকে আরও সুবিধাজনক বলে মনে করে।
উপরে, মডেলের গতিবিধি নিয়ন্ত্রণের জন্য ন্যূনতম প্রয়োজনীয় সংখ্যক চ্যানেল বিবেচনা করা হয়েছিল। কিন্তু মডেল ম্যানেজমেন্ট ফাংশন অনেক হতে পারে. বিশেষ করে কপি মডেলের উপর। বিমানে, এটি ল্যান্ডিং গিয়ার প্রত্যাহার, ফ্ল্যাপ এবং উইংয়ের অন্যান্য যান্ত্রিকীকরণ, সাইড লাইট, ল্যান্ডিং গিয়ারের চাকা ব্রেক নিয়ন্ত্রণ হতে পারে। জাহাজের মডেল-কপির জন্য আরও বেশি ফাংশন যা বিভিন্ন প্রক্রিয়া অনুকরণ করে বাস্তব জাহাজ. গ্লাইডারগুলি ফ্ল্যাপেরন এবং এয়ার ব্রেক (স্পয়লার), প্রত্যাহারযোগ্য ল্যান্ডিং গিয়ার এবং অন্যান্য ফাংশনগুলির নিয়ন্ত্রণ ব্যবহার করে। হেলিকপ্টারগুলি জাইরোস্কোপ সংবেদনশীলতা নিয়ন্ত্রণ, প্রত্যাহারযোগ্য ল্যান্ডিং গিয়ার এবং অন্যান্য অতিরিক্ত ফাংশন ব্যবহার করে। এই সমস্ত ফাংশন পরিচালনা করার জন্য, 6, 7, 8 এবং 12টি চ্যানেল পর্যন্ত ট্রান্সমিটার পাওয়া যায়। উপরন্তু, মডুলার ট্রান্সমিটারে চ্যানেলের সংখ্যা বাড়ানোর সম্ভাবনা রয়েছে।
এখানে এটি লক্ষ করা উচিত যে দুটি ধরণের নিয়ন্ত্রণ চ্যানেল রয়েছে - আনুপাতিক এবং বিযুক্ত। এটি ব্যাখ্যা করার সবচেয়ে সহজ উপায় একটি গাড়িতে: গ্যাস একটি আনুপাতিক চ্যানেল, এবং হেডলাইটগুলি পৃথক। এখন বিযুক্ত চ্যানেলগুলি শুধুমাত্র অক্জিলিয়ারী ফাংশনগুলি নিয়ন্ত্রণ করতে ব্যবহৃত হয়: হেডলাইট চালু করা, চ্যাসিস প্রত্যাহার করা। সমস্ত প্রধান নিয়ন্ত্রণ ফাংশন আনুপাতিক চ্যানেলের মাধ্যমে যায়। এই ক্ষেত্রে, মডেলের স্টিয়ারিং ডিফ্লেকশন ট্রান্সমিটারের জয়স্টিক ডিফ্লেকশনের সমানুপাতিক। সুতরাং, মডুলার ট্রান্সমিটারে আনুপাতিক এবং বিযুক্ত উভয় চ্যানেলের সংখ্যা প্রসারিত করা সম্ভব। এটি কীভাবে প্রযুক্তিগতভাবে করা হয়, আমরা পরে বিবেচনা করব।
মাল্টিচ্যানেলিংয়ের সাথে যুক্ত একটি মৌলিক ergonomic সমস্যা আছে। একজন ব্যক্তির মাত্র দুটি হাত আছে, যা একই সময়ে মাত্র চারটি কাজ নিয়ন্ত্রণ করতে পারে। বাস্তব বিমানে, পাইলটদের পা (প্যাডেল) এখনও ব্যবহার করা হয়। মডেলরা এখনও এই বিষয়ে আসেনি। অতএব, অবশিষ্ট চ্যানেলগুলির নিয়ন্ত্রণ পৃথক চ্যানেলগুলির জন্য পৃথক টগল সুইচ বা আনুপাতিকগুলির জন্য নবগুলি থেকে বাহিত হয়, বা এই সহায়ক ফাংশনগুলি প্রধানগুলি থেকে গণনা করে প্রাপ্ত হয়। উপরন্তু, মডেল নিয়ন্ত্রণ সংকেত সরাসরি জয়স্টিক থেকে নিয়ন্ত্রিত করা যাবে না, কিন্তু প্রি-প্রসেস করা যেতে পারে।
সংকেত প্রক্রিয়াকরণ এবং মিশ্রণ নিয়ন্ত্রণ
পূর্ববর্তী অধ্যায়গুলি পড়ার পরে, আমরা আশা করি আপনি দুটি প্রধান পয়েন্ট বুঝতে সক্ষম হয়েছেন:
- ট্রান্সমিটারটি বিভিন্ন উপায়ে রাখা যেতে পারে, তবে মূল জিনিসটি এটি ফেলে দেওয়া নয়
- ট্রান্সমিটারগুলিতে অনেকগুলি চ্যানেল রয়েছে এবং এটি সর্বদা কেবল দুটি হাতের সাহায্যে নিয়ন্ত্রণ করা প্রয়োজন, যা কখনও কখনও খুব সহজ নয়
এখন যেহেতু আমরা একটি প্রাথমিক বোঝাপড়া করেছি, আসুন আরও কয়েকটি ব্যবহারিক পয়েন্ট দেখি যা ট্রান্সমিটারগুলি প্রয়োগ করে:
- ছাঁটাই
- সংবেদনশীলতা সমন্বয় হ্যান্ডেল
- চ্যানেল বিপরীত
- servos খরচ সীমিত
- মিশ্রণ
- অন্যান্য বৈশিষ্ট্য

ছাঁটাই একটি খুব গুরুত্বপূর্ণ জিনিস। আপনি যদি মডেলটি চালানোর সময় ট্রান্সমিটার নবগুলি ছেড়ে দেন, স্প্রিংগুলি তাদের নিরপেক্ষ অবস্থানে ফিরিয়ে দেবে। মডেল তারপর সোজা সরানো হবে আশা করা বেশ যৌক্তিক. যাইহোক, বাস্তবে এটি সর্বদা হয় না। এই জন্য অনেক কারণ আছে। উদাহরণস্বরূপ, আপনি যদি একটি নতুন নির্মিত বিমান চালু করেন, তবে আপনি ইঞ্জিন থেকে টর্কের ভুল গণনা করতে পারেন এবং সাধারণভাবে মডেলটি খুব কমই পুরোপুরি প্রতিসম এবং আকারে সঠিক। ফলস্বরূপ, এমনকি যদি rudders সোজা দেখায়, মডেল এখনও সোজা উড়ে না, কিন্তু একরকম ভিন্নভাবে। পরিস্থিতি সংশোধন করতে, rudders অবস্থান সংশোধন করা প্রয়োজন হবে। কিন্তু এটি বেশ স্পষ্ট যে লঞ্চের সময় মডেলটিতে সরাসরি এটি করা খুবই অবাস্তব। ট্রান্সমিটার নবগুলিকে সঠিক দিকে নিয়ে যাওয়া অনেক সহজ হবে। যে জন্য trimmers কি! এগুলি জয়স্টিকগুলির পাশে এমন ছোট অতিরিক্ত লিভার যা তাদের অফসেট সেট করে। এখন, আপনি যদি মডেলের রডারগুলির নিরপেক্ষ অবস্থান সংশোধন করতে চান তবে আপনাকে কেবল পছন্দসই ট্রিমার ব্যবহার করতে হবে। তদুপরি, যা বিশেষভাবে মূল্যবান, মডেলের প্রতিক্রিয়া পর্যবেক্ষণ করে, লঞ্চের সময়, ট্রিমিংটি চলতে চলতেই করা যেতে পারে। যদি আপনি খুঁজে পান যে প্রাথমিকভাবে মডেলটিকে ছাঁটাই করার প্রয়োজন নেই - নিজেকে খুব ভাগ্যবান মনে করুন।
কলমের সংবেদনশীলতা সামঞ্জস্য করা একটি সম্পূর্ণরূপে বোধগম্য বৈশিষ্ট্য। যখন আপনি একটি নির্দিষ্ট মডেলের জন্য নিয়ন্ত্রণগুলি কাস্টমাইজ করেন, তখন আপনার সংবেদনশীলতাকে সেই স্তরে সেট করা উচিত যা নিয়ন্ত্রণ করতে আপনার পক্ষে সবচেয়ে আরামদায়ক। অন্যথায়, মডেলটি ট্রান্সমিটার নোবগুলিতে খুব তীক্ষ্ণ প্রতিক্রিয়া দেখাবে বা বিপরীতভাবে, খুব অলসভাবে। আরও "উন্নত" মডেলগুলি আপনাকে ট্রান্সমিটার নবগুলির সংবেদনশীলতাকে একটি সূচকীয় ফাংশনে সেট করার অনুমতি দেয়, যাতে দুর্বল বিচ্যুতিগুলির সাথে আরও সঠিকভাবে "স্টিয়ার" করা যায়।
আমরা যদি এখন মানসিকভাবে দ্রুত মডেলের দিকে এগিয়ে যাই, তাহলে আমরা দেখতে পাব যে সার্ভোগুলি কীভাবে সেট আপ করা হয়েছে এবং কীভাবে সংযোগগুলি সংযুক্ত করা হয়েছে তার উপর নির্ভর করে আমাদের তাদের অপারেশনের দিক পরিবর্তন করতে হতে পারে। এটি করার জন্য, সমস্ত ট্রান্সমিটার আপনাকে স্বাধীনভাবে নিয়ন্ত্রণ চ্যানেলগুলিকে বিপরীত করার অনুমতি দেয়।
মডেলের মেকানিক্সের নিজেই সীমাবদ্ধতা থাকতে পারে, তাই কখনও কখনও সার্ভোগুলির চলাচল সীমিত করা প্রয়োজন। এটি করার জন্য, অনেক ট্রান্সমিটারের একটি পৃথক স্ট্রোক সীমিত ফাংশন আছে, যদিও এটি উপলব্ধ না হলে, আপনি knobs এর সংবেদনশীলতা সামঞ্জস্য করে পেতে চেষ্টা করতে পারেন।
|
|
|


এখন সময় এসেছে আরো কঠিন পয়েন্টে স্পর্শ করার এবং মিক্সিং কি তা আপনাকে বলার।
কখনও কখনও এটি প্রয়োজন হতে পারে যে একটি মডেলের সার্ভো একাধিক ট্রান্সমিটার স্টিক থেকে একযোগে নিয়ন্ত্রিত হবে। একটি ভাল উদাহরণ একটি উড়ন্ত ডানা হতে পারে যেখানে উভয় আইলরন বিমানের উচ্চতা এবং রোল নিয়ন্ত্রণ করে, যেমন প্রতিটির নড়াচড়া নির্ভর করে ট্রান্সমিটারের উচ্চতা এবং রোল স্টিকগুলির গতিবিধির উপর। এই ধরনের আইলরনকে বলা হয় এলিভন:

যখন আমরা উচ্চতা নিয়ন্ত্রণ করি, উভয় এলিভন একই সাথে উপরে বা নিচে বিচ্যুত হয় এবং যখন আমরা রোল নিয়ন্ত্রণ করি, তখন এলিভনগুলি অ্যান্টিফেজে কাজ করে।
এলিভন সংকেতগুলি উচ্চতা এবং রোল সংকেতের অর্ধ-সমষ্টি এবং অর্ধ-পার্থক্য হিসাবে গণনা করা হয়:
Elevon1 = (উচ্চতা + রোল) / 2
Elevon2 = (উচ্চতা - রোল) / 2
সেগুলো. দুটি নিয়ন্ত্রণ চ্যানেল থেকে সংকেত মিশ্রিত হয় এবং তারপর দুটি কর্মক্ষমতা চ্যানেলে পাঠানো হয়। এই ধরনের গণনা, যেখানে বেশ কয়েকটি কন্ট্রোল নব থেকে ডেটা জড়িত থাকে, মিক্সিং বলা হয়।
মিশ্রণটি ট্রান্সমিটার এবং মডেল উভয় ক্ষেত্রেই প্রয়োগ করা যেতে পারে। এবং বাস্তবায়ন নিজেই ইলেকট্রনিক এবং যান্ত্রিক উভয় হতে পারে।
|
|
|


বিশেষ করে নতুনদের জন্য (হেলিকপ্টার পাইলট বাদে), আমি মনে রাখতে চাই যে আপনি যে মডেলগুলি দিয়ে শুরু করবেন তাদের কাজের জন্য সম্ভবত মিক্সারের প্রয়োজন হবে না। অধিকন্তু, আপনার খুব দীর্ঘ সময়ের জন্য মিক্সারের প্রয়োজন নাও হতে পারে (অথবা আপনার কখনই সেগুলির প্রয়োজন হতে পারে না)। সুতরাং আপনি যদি নিজেকে একটি সাধারণ 4-চ্যানেল জয়স্টিক সরঞ্জাম, বা একটি 2-চ্যানেল পিস্তল সরঞ্জাম কেনার সিদ্ধান্ত নেন, তাহলে মিক্সারের অনুপস্থিত হওয়ার কারণে আপনার মন খারাপ করা উচিত নয়।
আপনি ভাল উচ্চ মূল্য পরিসীমা ট্রান্সমিটার অন্যান্য বৈশিষ্ট্য অনেক খুঁজে পাবেন. একটি নির্দিষ্ট মডেলের জন্য তাদের প্রয়োজনীয়তার মাত্রা একটি বিতর্কিত বিষয়। তাদের সম্পর্কে ধারণা পেতে, আপনি নির্মাতাদের ওয়েবসাইটে এই ধরনের ট্রান্সমিটারের বিবরণ পড়তে পারেন।
এনালগ এবং কম্পিউটার ট্রান্সমিটার
অ্যানালগ এবং কম্পিউটার ট্রান্সমিটারের মধ্যে পার্থক্য বোঝার জন্য, আসুন আরও বাস্তবসম্মত উদাহরণ নেওয়া যাক। পনের বছর আগে, প্রোগ্রামেবল ফোন ছড়িয়ে পড়তে শুরু করে। তারা স্বাভাবিকের থেকে আলাদা ছিল, কথা বলা এবং কলারের নম্বর নির্ধারণের পাশাপাশি, তারা একটি বোতামে একটি সম্পূর্ণ নম্বর প্রোগ্রাম করা বা গ্রাহকদের একটি "কালো তালিকা" তৈরি করা সম্ভব করেছে যাদের ফোন কল করেনি। সাড়া. একগুচ্ছ অতিরিক্ত পরিষেবা উপস্থিত হয়েছিল, যা প্রায়শই একজন সাধারণ গ্রাহকের প্রয়োজন ছিল না। সুতরাং, একটি এনালগ ট্রান্সমিটার একটি সাধারণ টেলিফোনের মতো। এটিতে সাধারণত 6টির বেশি চ্যানেল থাকে না। একটি নিয়ম হিসাবে, উপরে বর্ণিত পরিষেবাগুলির মধ্যে সবচেয়ে সহজ প্রয়োগ করা হয়েছে: একটি চ্যানেল বিপরীত (কখনও কখনও সব নয়), ছাঁটাই এবং সংবেদনশীলতা সমন্বয় (সাধারণত প্রথম 4টি চ্যানেলে), গ্যাস চ্যানেলের চরম মানগুলি সেট করে। (অলস এবং সর্বোচ্চ গতি)। সামঞ্জস্য সুইচ এবং potentiometers সঙ্গে করা হয়, কখনও কখনও একটি ছোট স্ক্রু ড্রাইভার সঙ্গে. এই ধরনের ডিভাইসগুলি শেখা সহজ, কিন্তু অপারেশনে তাদের নমনীয়তা সীমিত।
কম্পিউটার হার্ডওয়্যারটি এই বৈশিষ্ট্য দ্বারা চিহ্নিত করা হয় যে সেগুলির সমস্ত সেটিংস প্রোগ্রামেবল টেলিফোনের মতো একইভাবে বোতাম এবং একটি প্রদর্শন ব্যবহার করে প্রোগ্রাম করা যেতে পারে। সেবা এখানে একটি সমুদ্র হতে পারে. প্রধানগুলির মধ্যে, এটি নিম্নলিখিতগুলি লক্ষ্য করার মতো:
- মেমরি বিভিন্ন মডেলের জন্য উপলব্ধ. একটি খুব সহজ আইটেম. আপনি সমস্ত ফ্যাডার, রিভার্স এবং রেট সেটিংস মুখস্ত করতে পারেন যাতে আপনি যখন অন্য মডেলের সাথে এটি ব্যবহার করার সিদ্ধান্ত নেন তখন আপনাকে আপনার ট্রান্সমিটারটি পুনর্নির্মাণ করতে হবে না।
- ট্রিম মান মুখস্থ করা. একটি খুব সহজ বৈশিষ্ট্য. আপনাকে চিন্তা করতে হবে না যে পরিবহনের সময় ট্রিমারগুলি দুর্ঘটনাক্রমে ভেঙে যাবে এবং আপনাকে তাদের অবস্থান মনে রাখতে হবে। মডেল চালানোর আগে, এটি শুধুমাত্র পরীক্ষা করা যথেষ্ট হবে যে ট্রিমগুলি "কেন্দ্রে" সেট করা আছে।
- বিল্ট-ইন মিক্সার এবং অপারেশন মোড সুইচগুলির একটি বড় সংখ্যা আপনাকে জটিল মডেলগুলিতে বিভিন্ন ধরণের ফাংশন বাস্তবায়নের অনুমতি দেবে।
- ডিসপ্লের উপস্থিতি সরঞ্জাম সেট আপ করা অনেক সহজ করে তোলে।
ফাংশন সংখ্যা এবং দামের পরিপ্রেক্ষিতে, কম্পিউটার সরঞ্জাম বেশ ব্যাপকভাবে পরিবর্তিত হয়। প্রস্তুতকারকের ওয়েবসাইটে বা নির্দেশাবলীতে নির্দিষ্ট বৈশিষ্ট্যগুলি দেখতে সর্বদা ভাল।
সস্তা ডিভাইসগুলি ন্যূনতম বৈশিষ্ট্যগুলির সাথে আসতে পারে এবং প্রাথমিকভাবে ব্যবহারের সহজতার উপর ফোকাস করা হয়। এটি প্রাথমিকভাবে মডেল মেমরি, ডিজিটাল ট্রিমস এবং কয়েকটি মিক্সার।

আরও পরিশীলিত ট্রান্সমিটারগুলিতে আরও বৈশিষ্ট্য, একটি বর্ধিত প্রদর্শন এবং অতিরিক্ত ডেটা কোডিং মোড থাকে (হস্তক্ষেপ থেকে রক্ষা করতে এবং তথ্য স্থানান্তরের গতি বাড়াতে)।

কম্পিউটার ট্রান্সমিটারের শীর্ষ মডেলগুলিতে বড় এলাকা গ্রাফিক ডিসপ্লে থাকে, কিছু ক্ষেত্রে এমনকি স্পর্শ নিয়ন্ত্রণের সাথেও:
|
|
|


ব্যবহারের সুবিধার জন্য বা বিশেষ করে কিছু জটিল বৈশিষ্ট্যের জন্য এই ধরনের মডেলগুলি কেনার জন্য এটি বোধগম্য হয় (যা আপনার প্রয়োজন হতে পারে যদি আপনি গুরুতরভাবে খেলাধুলা করতে চান)। পরিশীলিততা এই সত্যের দিকে পরিচালিত করে যে শীর্ষ মডেলগুলি ইতিমধ্যেই একে অপরের সাথে প্রতিদ্বন্দ্বিতা করছে ফাংশনের সংখ্যার ক্ষেত্রে নয়, কিন্তু প্রোগ্রামিং সুবিধার ক্ষেত্রে।
অনেক কম্পিউটার ট্রান্সমিটারে বিনিময়যোগ্য মডেল সেটিংস মেমরি মডিউল রয়েছে যা আপনাকে অন্তর্নির্মিত মেমরি প্রসারিত করতে দেয়, সেইসাথে সহজেই মডেল সেটিংস এক ট্রান্সমিটার থেকে অন্যটিতে স্থানান্তর করতে দেয়। বেশ কয়েকটি মডেল ট্রান্সমিটারের ভিতরে একটি বিশেষ বোর্ড প্রতিস্থাপন করে নিয়ন্ত্রণ প্রোগ্রাম পরিবর্তন করার জন্য প্রদান করে। একই সময়ে, আপনি কেবল মেনু প্রম্পটগুলির ভাষাই পরিবর্তন করতে পারবেন না (যাইভাবে, লেখকরা রাশিয়ান ভাষা পূরণ করেননি), তবে ট্রান্সমিটারে আরও সাম্প্রতিক একটি ইনস্টল করতে পারেন। সফটওয়্যারনতুন সম্ভাবনার সাথে।
এটি উল্লেখ করা উচিত যে কম্পিউটার সরঞ্জাম ব্যবহারে নমনীয়তারও নেতিবাচক বৈশিষ্ট্য রয়েছে। একজন লেখক সম্প্রতি তার শাশুড়িকে একটি প্রোগ্রামেবল ফোন দিয়েছিলেন, তাই তিনি এক সপ্তাহের জন্য এটির প্রোগ্রামিং নিয়ে ব্যস্ত ছিলেন এবং তাকে একটি সাধারণ ফোন কেনার অনুরোধ জানিয়ে এটি ফিরিয়ে দিয়েছেন, যেমন তিনি বলেছেন, "সাধারণ ফোন।"
রেডিও সংকেত গঠনের নীতি
এখন আমরা মডেলিংয়ের সমস্যাগুলি থেকে দূরে সরে যাব এবং রেডিও ইঞ্জিনিয়ারিংয়ের সমস্যাগুলি বিবেচনা করব, যেমন, কীভাবে ট্রান্সমিটার থেকে তথ্য রিসিভারের কাছে যায়। যারা রেডিও সিগন্যাল কী তা সত্যিই বোঝেন না তাদের জন্য, এই অধ্যায়টি বাদ দেওয়া যেতে পারে, শুধুমাত্র শেষে দেওয়া গুরুত্বপূর্ণ সুপারিশগুলিতে মনোযোগ দিয়ে।
সুতরাং, মডেল রেডিও ইঞ্জিনিয়ারিং এর মৌলিক বিষয়। ট্রান্সমিটার দ্বারা নির্গত রেডিও সংকেত যাতে দরকারী তথ্য বহন করে, এটি মডিউল করা হয়। অর্থাৎ, নিয়ন্ত্রণ সংকেত রেডিও ফ্রিকোয়েন্সি ক্যারিয়ারের পরামিতি পরিবর্তন করে। অনুশীলনে, ক্যারিয়ারের প্রশস্ততা এবং ফ্রিকোয়েন্সি নিয়ন্ত্রণ, AM (অ্যামপ্লিটিউড মডুলেশন) এবং এফএম (ফ্রিকোয়েন্সি মডুলেশন) অক্ষর দ্বারা চিহ্নিত করা হয়েছে। রেডিও নিয়ন্ত্রণ শুধুমাত্র বিচ্ছিন্ন দ্বি-স্তরের মড্যুলেশন ব্যবহার করে। AM সংস্করণে, ক্যারিয়ারের হয় সর্বোচ্চ বা শূন্য স্তর থাকে। এফএম সংস্করণে, ধ্রুবক প্রশস্ততার একটি সংকেত নির্গত হয়, হয় একটি ফ্রিকোয়েন্সি F সহ বা একটি সামান্য স্থানান্তরিত ফ্রিকোয়েন্সি F + df সহ। একটি এফএম ট্রান্সমিটারের সংকেত যথাক্রমে F এবং F + df ফ্রিকোয়েন্সিতে অ্যান্টিফেজে কাজ করা দুটি AM ট্রান্সমিটারের দুটি সংকেতের সমষ্টির সাথে সাদৃশ্যপূর্ণ। এটি থেকে, কেউ রিসিভারে রেডিও সিগন্যাল প্রক্রিয়াকরণের সূক্ষ্মতা না জেনেও বুঝতে পারে যে, একই হস্তক্ষেপের শর্তে, এফএম সিগন্যালে এএম সিগন্যালের চেয়ে মৌলিকভাবে বেশি শব্দ প্রতিরোধ ক্ষমতা রয়েছে। AM সরঞ্জাম সাধারণত সস্তা, কিন্তু পার্থক্য খুব বড় নয়। বর্তমানে, AM সরঞ্জামের ব্যবহার শুধুমাত্র সেই ক্ষেত্রেই ন্যায্য যে মডেলের দূরত্ব তুলনামূলকভাবে ছোট। একটি নিয়ম হিসাবে, এটি মডেল গাড়ি, জাহাজ মডেল এবং অন্দর মডেল বিমানের জন্য সত্য। সাধারণভাবে, আপনি খুব সতর্কতার সাথে এবং শিল্প কেন্দ্র থেকে দূরে AM সরঞ্জাম ব্যবহার করে উড়তে পারেন। দুর্ঘটনা খুব ব্যয়বহুল।
মড্যুলেশন, যেমনটি আমরা প্রতিষ্ঠিত করেছি, নির্গত ক্যারিয়ারের উপর দরকারী তথ্যকে উচ্চতর করা সম্ভব করে তোলে। যাইহোক, রেডিও নিয়ন্ত্রণ শুধুমাত্র মাল্টি-চ্যানেল তথ্য ট্রান্সমিশন ব্যবহার করে। এটি করার জন্য, কোডিং এর মাধ্যমে সমস্ত চ্যানেলকে মাল্টিপ্লেক্স করা হয়। এখন এর জন্য শুধুমাত্র পালস-প্রস্থ মড্যুলেশন ব্যবহার করা হয়, অক্ষর PPM (পালস ফেজ মড্যুলেশন) এবং পালস-কোড মডুলেশন দ্বারা চিহ্নিত করা হয়, PCM (পালস কোড মডুলেশন) অক্ষর দ্বারা চিহ্নিত করা হয়। মাল্টি-চ্যানেল রেডিও কন্ট্রোলে কোডিং বোঝাতে এবং ক্যারিয়ারের তথ্য ওভারলে করার জন্য "মডুলেশন" শব্দটি ব্যবহার করা হয় এই কারণে, এই ধারণাগুলি প্রায়শই বিভ্রান্ত হয়। এখন এটি আপনার কাছে স্পষ্ট হওয়া উচিত যে এগুলি "দুটি বড় পার্থক্য", যেমন তারা ওডেসাতে বলতে চায়।
একটি পাঁচ-চ্যানেল সরঞ্জামের একটি সাধারণ পিপিএম সংকেত বিবেচনা করুন:

PPM সংকেতের একটি নির্দিষ্ট সময়সীমার দৈর্ঘ্য T=20ms আছে। এর মানে হল যে ট্রান্সমিটারে কন্ট্রোল নবগুলির অবস্থান সম্পর্কে তথ্য প্রতি সেকেন্ডে 50 বার মডেলে প্রবেশ করে, যা নিয়ন্ত্রণ সরঞ্জামের গতি নির্ধারণ করে। একটি নিয়ম হিসাবে, এটি যথেষ্ট, যেহেতু মডেলের আচরণে পাইলটের প্রতিক্রিয়ার গতি অনেক কম। সমস্ত চ্যানেল সংখ্যাযুক্ত এবং সংখ্যাসূচক ক্রমে প্রেরণ করা হয়। চ্যানেলে সংকেতের মান প্রথম এবং দ্বিতীয় পালসের মধ্যে সময়ের ব্যবধানের মান দ্বারা নির্ধারিত হয় - প্রথম চ্যানেলের জন্য, দ্বিতীয় এবং তৃতীয়টির মধ্যে - দ্বিতীয় চ্যানেলের জন্য ইত্যাদি।
সময় ব্যবধানের মান পরিবর্তনের পরিসর যখন জয়স্টিক এক চরম অবস্থান থেকে অন্য অবস্থানে চলে যায় তখন 1 থেকে 2 ms পর্যন্ত সংজ্ঞায়িত করা হয়। 1.5 ms এর মান জয়স্টিক (নিয়ন্ত্রণ গাঁট) এর মধ্যবর্তী (নিরপেক্ষ) অবস্থানের সাথে মিলে যায়। ইন্টারচ্যানেল পালসের সময়কাল প্রায় 0.3 এমএস। এই PPM সিগন্যাল কাঠামোটি RC সরঞ্জামের সমস্ত নির্মাতাদের জন্য আদর্শ। বিভিন্ন নির্মাতাদের জন্য হ্যান্ডেলের গড় অবস্থানের মানগুলি সামান্য পরিবর্তিত হতে পারে: Futaba-এর জন্য 1.52 ms, Hitec-এর জন্য 1.5 ms এবং Multiplex-এর জন্য 1.6৷ কিছু ধরণের কম্পিউটার ট্রান্সমিটারের পরিবর্তনের পরিসর 0.8 ms থেকে 2.2 ms পর্যন্ত বিস্তৃত হতে পারে। যাইহোক, এই ধরনের বৈচিত্রগুলি পিপিএম কোডিং মোডে অপারেটিং বিভিন্ন নির্মাতাদের হার্ডওয়্যার উপাদানগুলির মিশ্র ব্যবহারের অনুমতি দেয়।
পিপিএম কোডিংয়ের বিকল্প হিসাবে, পিসিএম কোডিং 15 বছর আগে তৈরি করা হয়েছিল। দুর্ভাগ্যবশত, RC সরঞ্জামের বিভিন্ন নির্মাতারা একটি একক PCM সংকেত বিন্যাসে একমত হতে পারেনি, এবং প্রতিটি প্রস্তুতকারক তার নিজস্ব নিয়ে এসেছে। বিভিন্ন কোম্পানির সরঞ্জামগুলির PCM সংকেতের নির্দিষ্ট বিন্যাস সম্পর্কে আরও বিশদ বিবরণ "PPM বা PCM?" নিবন্ধে বর্ণিত হয়েছে। এছাড়াও PCM কোডিং এর সুবিধা এবং অসুবিধা আছে। এখানে আমরা শুধুমাত্র বিভিন্ন ফর্ম্যাটের একটি ফলাফল উল্লেখ করব: PCM মোডে, একই নির্মাতার থেকে শুধুমাত্র রিসিভার এবং ট্রান্সমিটার একসাথে ব্যবহার করা যেতে পারে।
মডুলেশন মোডের স্বরলিপি সম্পর্কে কয়েকটি শব্দ। দুটি ধরণের ক্যারিয়ার মডুলেশন এবং দুটি কোডিং পদ্ধতির সংমিশ্রণ সরঞ্জাম মোডের জন্য তিনটি বিকল্পের জন্ম দেয়। তিন কারণ অ্যামপ্লিটিউড মড্যুলেশন পালস কোড মড্যুলেশনের সাথে একত্রে ব্যবহৃত হয় না - এর কোন মানে হয় না। প্রথমটির খুব দুর্বল শব্দ প্রতিরোধ ক্ষমতা রয়েছে, যা পালস কোড মড্যুলেশন ব্যবহার করার প্রধান কারণ। এই তিনটি সংমিশ্রণকে প্রায়শই এএম, এফএম এবং পিসিএম হিসাবে উল্লেখ করা হয়। এটা স্পষ্ট যে AM-এ - প্রশস্ততা মড্যুলেশন এবং PPM কোডিং, FM - ফ্রিকোয়েন্সি মড্যুলেশন এবং PPM কোডিং, কিন্তু PCM - ফ্রিকোয়েন্সি মডুলেশন এবং PCM কোডিং-এ।
তাই এখন আপনি জানেন যে:
- এএম সরঞ্জামের ব্যবহার শুধুমাত্র গাড়ির মডেল, জাহাজের মডেল এবং ইনডোর মডেলের বিমানের জন্য ন্যায্য।
- AM সরঞ্জাম ব্যবহার করে উড়ান শুধুমাত্র অত্যন্ত সতর্কতার সাথে এবং শিল্প কেন্দ্র থেকে দূরে সম্ভব।
- আপনি পিপিএম এনকোডিং মোডে কাজ করে এমন বিভিন্ন নির্মাতার হার্ডওয়্যার উপাদান ব্যবহার করতে পারেন।
- PCM মোডে, একই নির্মাতার থেকে শুধুমাত্র রিসিভার এবং ট্রান্সমিটার একসাথে ব্যবহার করা যেতে পারে।
মডুলার সম্প্রসারণ
মডুলার ট্রান্সমিটার প্রধানত দূরবর্তী সংস্করণে উত্পাদিত হয়। এই ক্ষেত্রে, রিমোট কন্ট্রোল প্যানেলে অনেক জায়গা রয়েছে যেখানে আপনি অতিরিক্ত নব, টগল সুইচ এবং অন্যান্য নিয়ন্ত্রণ রাখতে পারেন। অন্যান্য ক্ষেত্রে, আমরা একটি টুইন-ইঞ্জিন বোট বা ট্যাঙ্ক নিয়ন্ত্রণের জন্য একটি মডিউল উল্লেখ করি। এটি একটি দুই-সমন্বয়কারী জয়স্টিকের পরিবর্তে ইনস্টল করা হয়েছে এবং এটি একটি শুঁয়োপোকা ট্র্যাক্টরের ক্লাচ লিভারের মতো। এটির সাহায্যে, আপনি প্যাচে এই জাতীয় মডেল স্থাপন করতে পারেন:

আসুন এখন ব্যাখ্যা করি কিভাবে চ্যানেলগুলি সংকুচিত হয় যখন তাদের সংখ্যা মডুলারভাবে প্রসারিত হয়। বিভিন্ন নির্মাতাদের দ্বারামডিউলগুলি উত্পাদিত হয় যা একটি প্রধান চ্যানেলে 8টি সমানুপাতিক বা বিযুক্ত অতিরিক্ত চ্যানেল প্রেরণের অনুমতি দেয়। এই ক্ষেত্রে, ট্রান্সমিটারে আটটি নব বা টগল সুইচ সহ একটি এনকোডার মডিউল ইনস্টল করা আছে, যা একটি প্রধান চ্যানেল দখল করে এবং আটটি আনুপাতিক বা বিযুক্ত আউটপুট সহ একটি ডিকোডার এই চ্যানেলের সকেটে রিসিভারের সাথে সংযুক্ত থাকে। কম্প্রেশন নীতিটি এই প্রধান চ্যানেলের মাধ্যমে অনুক্রমিক সংক্রমণে হ্রাস করা হয়, প্রতি 20 মিলিসেকেন্ড চক্রে একটি অতিরিক্ত একটি। অর্থাৎ, ট্রান্সমিটার থেকে রিসিভার পর্যন্ত আটটি অতিরিক্ত চ্যানেলের তথ্য শুধুমাত্র আটটি সংকেত চক্রের পরেই পাওয়া যাবে - 0.16 সেকেন্ডে। প্রতিটি ডিকম্প্রেসড চ্যানেলের জন্য, ডিকোডার একটি স্বাভাবিকের মতো একটি আউটপুট সংকেত তৈরি করে - প্রতি 0.02 সেকেন্ডে একবার, একই মান আট বার পুনরাবৃত্তি করে। এটি দেখায় যে মাল্টিপ্লেক্সড চ্যানেলগুলি অনেক ধীর এবং মডেলের দ্রুত এবং গুরুত্বপূর্ণ নিয়ন্ত্রণ ফাংশনগুলি নিয়ন্ত্রণ করতে তাদের ব্যবহার করা অনুপযুক্ত। এইভাবে 30-চ্যানেলের সরঞ্জাম তৈরি করাও সম্ভব। এটি কিসের জন্যে? একটি উদাহরণ হিসাবে, এখানে প্রধান ট্র্যাক্টরের মডেল-কপির আলো এবং সংকেত মডিউলের ফাংশনগুলির একটি তালিকা রয়েছে:
- পার্কিং বাতি
- উচ্চ মরীচি
- ডুবানো মরীচি
- স্পটলাইট ফাইন্ডার
- স্টপ সিগন্যাল
- এনগেজ রিভার্স (শেষ দুটি ফাংশন থ্রটল কন্ট্রোলের অবস্থান থেকে স্বয়ংক্রিয়ভাবে সক্রিয় হয়)
- বাম মোড়
- ডানদিকে মোড়
- কেবিন আলো
- ক্ল্যাক্সন
- আলোর ঝলকানি
মডুলার ট্রান্সমিটারগুলি প্রায়শই কপিস্টদের দ্বারা ব্যবহৃত হয়, যাদের জন্য মডেলের দর্শনীয় আচরণ, এটি কেমন দেখাচ্ছে তার বাস্তবতা, আচরণের গতিশীলতার চেয়ে বেশি গুরুত্বপূর্ণ। মডুলার ট্রান্সমিটারের জন্য, প্রচুর সংখ্যক বিভিন্ন উদ্দেশ্য-নির্মিত মডিউল উপলব্ধ। আসুন এখানে শুধুমাত্র অ্যারোবেটিক মডেলের আইলারন ছাঁটাই করার ব্লক উল্লেখ করা যাক। মনোব্লক ট্রান্সমিটারের বিপরীতে, যেখানে "ফ্ল্যাপেরন", এয়ার ব্রেক - (আমাদের "কুমির" এবং পশ্চিমে "প্রজাপতি") নিয়ন্ত্রণের পরামিতিগুলি এবং মেনুতে ডিফারেনশিয়াল বিচ্যুতি মোডগুলি প্রোগ্রাম করা হয়, এখানে প্রতিটি পরামিতি নিজস্বভাবে প্রদর্শিত হয় গাঁট এটি আপনাকে সরাসরি বাতাসে সুর করতে দেয়, যেমন উড়ন্ত মডেল থেকে দূরে না তাকিয়ে. যদিও এটাও স্বাদের ব্যাপার।
ট্রান্সমিটার ডিভাইস
রেডিও কন্ট্রোল ইকুইপমেন্ট ট্রান্সমিটারে একটি হাউজিং, কন্ট্রোল (জয়স্টিক, নব, টগল সুইচ ইত্যাদি), একটি এনকোডার বোর্ড, একটি আরএফ মডিউল, একটি অ্যান্টেনা এবং একটি ব্যাটারি থাকে। এছাড়াও, কম্পিউটার ট্রান্সমিটারে একটি প্রদর্শন এবং প্রোগ্রামিং বোতাম রয়েছে। শরীর এবং নিয়ন্ত্রণ সম্পর্কে ব্যাখ্যা উপরে দেওয়া হয়েছে.
সম্পূর্ণ কম-ফ্রিকোয়েন্সি ট্রান্সমিটার সার্কিট এনকোডার বোর্ডে একত্রিত হয়। এনকোডার পর্যায়ক্রমে নিয়ন্ত্রণগুলির অবস্থান (জয়স্টিক, নব, টগল সুইচ, ইত্যাদি) পোল করে এবং এটি অনুসারে, পিপিএম (বা পিসিএম) সংকেতের চ্যানেল পালস তৈরি করে। সমস্ত মিশ্রণ এবং অন্যান্য পরিষেবাগুলি (সূচক, স্ট্রোক সীমা, ইত্যাদি) এখানেও গণনা করা হয়৷ এনকোডার থেকে, সংকেতটি আরএফ মডিউল এবং প্রশিক্ষক সংযোগকারীতে যায় (যদি থাকে)।
আরএফ মডিউলটিতে ট্রান্সমিটারের উচ্চ ফ্রিকোয়েন্সি অংশ রয়েছে। এখানে, একটি মাস্টার ক্রিস্টাল অসিলেটর একত্রিত করা হয় যা চ্যানেলের ফ্রিকোয়েন্সি, একটি ফ্রিকোয়েন্সি বা প্রশস্ততা মডুলেটর, ট্রান্সমিটারের একটি পরিবর্ধক-আউটপুট পর্যায়, একটি অ্যান্টেনা ম্যাচিং সার্কিট এবং আউট-অফ-ব্যান্ড রেডিয়েশন ফিল্টারিং নির্ধারণ করে। সাধারণ ট্রান্সমিটারে, আরএফ মডিউলটি আলাদাভাবে একত্রিত হয় মুদ্রিত সার্কিট বোর্ডএবং ট্রান্সমিটার হাউজিং ভিতরে স্থাপন. আরও উন্নত মডেলগুলিতে, আরএফ মডিউলটি একটি পৃথক হাউজিংয়ে স্থাপন করা হয় এবং ট্রান্সমিটারের একটি কুলুঙ্গিতে ঢোকানো হয়:


এই ক্ষেত্রে, কোন প্রতিস্থাপনযোগ্য কোয়ার্টজ নেই, এবং রেডিও সংকেত বাহক একটি বিশেষ ফ্রিকোয়েন্সি সিন্থেসাইজার দ্বারা গঠিত হয়। ট্রান্সমিটারটি যে ফ্রিকোয়েন্সি (চ্যানেল) কাজ করবে তা RF ইউনিটের সুইচগুলি ব্যবহার করে সেট করা হয়। ট্রান্সমিটারের কিছু শীর্ষ মডেল সরাসরি প্রোগ্রামিং মেনু থেকে সিন্থেসাইজারের ফ্রিকোয়েন্সি সেট করতে সক্ষম। এই ধরনের বৈশিষ্ট্যগুলি আপনাকে রেস এবং প্রতিযোগিতার রাউন্ডের যে কোনও সংমিশ্রণে বিভিন্ন চ্যানেলে পাইলটদের সহজেই বিতরণ করতে দেয়।
প্রায় সব রেডিও কন্ট্রোল ট্রান্সমিটার একটি টেলিস্কোপিক অ্যান্টেনা ব্যবহার করে। উন্মোচন করা হলে, এটি বেশ কার্যকর, এবং যখন ভাঁজ করা হয়, এটি কম্প্যাক্ট হয়। কিছু ক্ষেত্রে, এটি একটি সংক্ষিপ্ত সর্পিল সঙ্গে স্ট্যান্ডার্ড অ্যান্টেনা প্রতিস্থাপন করার অনুমতি দেওয়া হয়, অনেক কোম্পানি দ্বারা উত্পাদিত, বা একটি বাড়িতে তৈরি একটি।

প্রতিযোগিতার তাড়াহুড়োতে এটি ব্যবহার করা অনেক বেশি সুবিধাজনক এবং আরও দৃঢ়। যাইহোক, রেডিওফিজিক্সের আইনের কারণে, এর কার্যকারিতা সর্বদা একটি স্ট্যান্ডার্ড টেলিস্কোপিকের চেয়ে কম থাকে এবং বড় শহরগুলির কঠিন হস্তক্ষেপের পরিবেশে উড়ন্ত মডেলের জন্য এটি ব্যবহার করার পরামর্শ দেওয়া হয় না।
ব্যবহারের সময়, টেলিস্কোপিক অ্যান্টেনাকে তার পূর্ণ দৈর্ঘ্যে প্রসারিত করতে হবে, অন্যথায় পরিসীমা এবং যোগাযোগের নির্ভরযোগ্যতা দ্রুত হ্রাস পাবে। অ্যান্টেনা ভাঁজ করে, ফ্লাইট (আগমন) আগে, তারা রেডিও চ্যানেলের নির্ভরযোগ্যতা পরীক্ষা করে - 25-30 মিটার পর্যন্ত দূরত্বে, সরঞ্জামগুলি কাজ করা উচিত। অ্যান্টেনা ভাঁজ করলে সাধারণত কাজ করা ট্রান্সমিটারের ক্ষতি হয় না। অনুশীলনে, অ্যান্টেনা ভাঁজ করার সময় RF মডিউলের ব্যর্থতার বিচ্ছিন্ন ঘটনা ছিল। স্পষ্টতই, এগুলি নিম্ন-মানের উপাদানগুলির কারণে ছিল এবং অ্যান্টেনা ভাঁজ নির্বিশেষে একই সম্ভাবনার সাথে ঘটতে পারে। এবং তবুও, ট্রান্সমিটারের টেলিস্কোপিক অ্যান্টেনা তার অক্ষের দিকে একটি সংকেত ভালভাবে বিকিরণ করে না। অতএব, মডেলে অ্যান্টেনা নির্দেশ না করার চেষ্টা করুন। বিশেষ করে যদি এটি দূরে থাকে এবং হস্তক্ষেপের পরিবেশ খারাপ হয়।
এমনকি বেশিরভাগ সাধারণ ট্রান্সমিটারের একটি "প্রশিক্ষক-ছাত্র" ফাংশন থাকে যা একজন নবীন পাইলটকে আরও অভিজ্ঞ একজনের দ্বারা প্রশিক্ষিত করার অনুমতি দেয়। এটি করার জন্য, দুটি ট্রান্সমিটার একটি বিশেষ "কোচ" সংযোগকারীর মাধ্যমে একে অপরের সাথে একটি তারের দ্বারা সংযুক্ত থাকে। প্রশিক্ষকের ট্রান্সমিটার রেডিও সংকেত নির্গমন মোডে চালু করা হয়। ছাত্রের ট্রান্সমিটার একটি রেডিও সংকেত নির্গত করে না, তবে তার এনকোডার থেকে PPM সংকেত তারের মাধ্যমে প্রশিক্ষকের ট্রান্সমিটারে প্রেরণ করা হয়। পরেরটির একটি "প্রশিক্ষক - ছাত্র" সুইচ রয়েছে। "প্রশিক্ষক" অবস্থানে, প্রশিক্ষকের ট্রান্সমিটারের হ্যান্ডেলগুলির অবস্থান সম্পর্কে মডেলটিতে একটি সংকেত প্রেরণ করা হয়। "ছাত্র" অবস্থানে - ছাত্রের ট্রান্সমিটার থেকে। যেহেতু সুইচটি প্রশিক্ষকের হাতে থাকে, সে যে কোনো মুহূর্তে মডেলের নিয়ন্ত্রণ নিয়ে নেয় এবং এর ফলে শিক্ষানবিসকে নিরাপদ করে, তাকে "ফায়ার কাঠ তৈরি" থেকে বাধা দেয়। এভাবেই উড়ন্ত মডেলদের প্রশিক্ষণ দেওয়া হয়। এনকোডার আউটপুট, "প্রশিক্ষক-ছাত্র" সুইচের ইনপুট, গ্রাউন্ড, এবং এনকোডারের পাওয়ার কন্ট্রোল পরিচিতি এবং আরএফ মডিউল প্রশিক্ষক সংযোগকারীর সাথে সংযুক্ত থাকে। কিছু মডেলে, ট্রান্সমিটারের পাওয়ার বন্ধ হয়ে গেলে তারের সংযোগ এনকোডারে পাওয়ার চালু করে। অন্যদের ক্ষেত্রে, ট্রান্সমিটার চালু থাকাকালীন নিয়ন্ত্রণের যোগাযোগটিকে মাটিতে সংক্ষিপ্ত করলে RF মডিউলটি বন্ধ হয়ে যাবে। প্রধান ফাংশন ছাড়াও, প্রশিক্ষক সংযোগকারী একটি সিমুলেটর দিয়ে কাজ করার সময় একটি কম্পিউটারে ট্রান্সমিটার সংযোগ করতে ব্যবহৃত হয়।
ট্রান্সমিটারগুলির পাওয়ার সাপ্লাই প্রমিত, এবং 9.6 ভোল্টের নামমাত্র ভোল্টেজ সহ নিকেল-ক্যাডমিয়াম (বা NiMH) ব্যাটারির ব্যাটারি থেকে সঞ্চালিত হয়। আটটি ক্যান থেকে। বিভিন্ন ট্রান্সমিটারের ব্যাটারি কম্পার্টমেন্টের একটি ভিন্ন আকার থাকে, যার অর্থ হল একটি ট্রান্সমিটারের একটি ফিনিশড ব্যাটারি অন্য আকারে মাপসই নাও হতে পারে।
|
|
|


সহজতম ট্রান্সমিটারগুলি প্রচলিত ডিসপোজেবল ব্যাটারি ব্যবহার করতে পারে। নিয়মিত ব্যবহারের জন্য, এটি ধ্বংসাত্মক।
ট্রান্সমিটারের শীর্ষ মডেলগুলিতে মডেলারের জন্য উপযোগী অতিরিক্ত নোড থাকতে পারে। মাল্টিপ্লেক্স, উদাহরণস্বরূপ, একটি প্যানোরামিক স্ক্যানিং রিসিভারকে তার 4000 মডেলে সংহত করে, যা আপনাকে ফ্লাইটের আগে ফ্রিকোয়েন্সি পরিসরে বিকিরণের উপস্থিতি দেখতে দেয়। কিছু ট্রান্সমিটারে বিল্ট-ইন থাকে (সহ দূরবর্তী সেন্সর) ট্যাকোমিটার। ফাইবার অপটিক্সের ভিত্তিতে তৈরি একটি প্রশিক্ষক তারের জন্য বিকল্প রয়েছে, যা গ্যালভানিক্যালি ট্রান্সমিটারগুলিকে ডিকপল করে এবং হস্তক্ষেপ করে না। এমনকি কোচ এবং ছাত্রের মধ্যে বেতার যোগাযোগের মাধ্যম রয়েছে। অনেক কম্পিউটার ট্রান্সমিটারে অপসারণযোগ্য মেমরি মডিউল থাকে যা মডেল সেটিংস সম্পর্কে তথ্য সঞ্চয় করে। তারা আপনাকে প্রোগ্রাম করা মডেলের সেট প্রসারিত করতে এবং ট্রান্সমিটার থেকে ট্রান্সমিটারে স্থানান্তর করতে দেয়।
তাই এখন আপনি জানেন যে:
- কোয়ার্টজ প্রতিস্থাপন করে, আপনি অপারেটিং সীমার মধ্যে সরঞ্জামের চ্যানেল পরিবর্তন করতে পারেন
- প্রতিস্থাপনযোগ্য আরএফ মডিউল প্রতিস্থাপন করে, এক ব্যান্ড থেকে অন্য ব্যান্ডে স্যুইচ করা সহজ।
- আরএফ মডিউলগুলি শুধুমাত্র এক ধরনের মড্যুলেশনের সাথে কাজ করার জন্য ডিজাইন করা হয়েছে: প্রশস্ততা বা ফ্রিকোয়েন্সি।
- ব্যবহারের সময়, টেলিস্কোপিক অ্যান্টেনাকে তার পূর্ণ দৈর্ঘ্যে প্রসারিত করতে হবে, অন্যথায় পরিসীমা এবং যোগাযোগের নির্ভরযোগ্যতা দ্রুত হ্রাস পাবে।
- অ্যান্টেনা ভাঁজ করলে কাজ করা ট্রান্সমিটারের ক্ষতি হয় না।
উপসংহার
রেডিও নিয়ন্ত্রণ সরঞ্জাম ট্রান্সমিটার বিষয়ের একটি সংক্ষিপ্ত ভূমিকা পড়ার পরে, আপনি মোটামুটিভাবে কল্পনা করেছেন যে আপনার কোন ট্রান্সমিটার প্রয়োজন। যাইহোক, বাজারের বিভিন্ন অফার পছন্দের সমস্যাটিকে সহজ করে তোলে না, বিশেষ করে রেডিও মডেলিংয়ের শুরুতে। আমাকে এই বিষয়ে কিছু পরামর্শ দিতে দিন.
রেডিও কন্ট্রোল ট্রান্সমিটার মডেলিং সম্পর্কিত সবকিছুর সবচেয়ে স্থায়ী অংশ। এটি পাইলটের হাতে, এবং ভয়ানক গতিতে তাড়াহুড়ো করে না, অন্যদের এবং মডেলটিকে নিজেই পঙ্গু করার চেষ্টা করে তার সমস্ত স্টাফিং সহ। আপনি যদি ট্রান্সমিটার ব্যাটারির পোলারিটি বিপরীত না করেন, আপনার পায়ের সাথে এটির উপর পা রাখবেন না এবং এটি মেঝেতে ফেলে দেবেন না, তাহলে এটি বিশ্বস্তভাবে বছর এবং দশক ধরে পরিবেশন করতে পারে। আপনি যদি একা মডেলিং করেন না, কিন্তু একজন ঘনিষ্ঠ বন্ধুর সাথে একসাথে, আপনি সাধারণত দুটির জন্য একটি ট্রান্সমিটার কিনতে পারেন। যেহেতু ট্রান্সমিটার একটি টেকসই উপাদান, তাই এখনই একটি ভালো ডিভাইস কেনা ভালো। এটি সস্তা হবে না, তবে এটি সময়ের সাথে সাথে আপনার ক্রমবর্ধমান চাহিদাগুলিকে কভার করবে এবং আপনাকে এটি এক বছর পরে অর্ধেক দামে বিক্রি করতে হবে না কারণ এতে কোনও মিক্সার বা অন্যান্য বৈশিষ্ট্য নেই৷ তবে চরমে যাবেন না এবং অবিলম্বে উপরের দামের সীমার ডিভাইসটি নিন। চ্যাম্পিয়ন অ্যাথলিট ট্রান্সমিটারগুলির এমন ক্ষমতা রয়েছে যা বুঝতে এবং ব্যবহার করতে কয়েক বছর সময় লাগবে। আপনার প্রতিপত্তির জন্য অতিরিক্ত অর্থ প্রদানের প্রয়োজন কিনা তা নিয়ে ভাবুন।
লেখকদের অভিজ্ঞতা অনুসারে, ট্রান্সমিটারের উত্পাদন গুণমান তাদের মূল্য গ্রুপের উপর নির্ভর করে। স্পষ্টতই, কারখানাগুলিতে, আরও ব্যয়বহুল মডেলগুলি সমাবেশের সময় এবং উপাদানগুলি কেনার পর্যায়ে উভয়ই আরও শক্তভাবে নিয়ন্ত্রণ করা হয়। একটি অপ্রীতিকর ট্রান্সমিটার ব্যর্থতা সাধারণত অত্যন্ত বিরল এবং ব্যয়বহুল মডেলগুলিতে প্রায় কখনও পাওয়া যায় না।
ব্যয়বহুল ট্রান্সমিটারের জন্য, বিশেষ অ্যালুমিনিয়াম স্যুটকেস তৈরি করা হয়, যা স্টোরেজ এবং এয়ারফিল্ডে পরিবহনের জন্য ব্যবহৃত হয়। সস্তা ডিভাইসের জন্য, আপনি একটি বিশেষ প্লাস্টিকের বাক্স কিনতে পারেন, বা এটি নিজেই তৈরি করতে পারেন। যারা নিয়মিত (সাপ্তাহিক) ফ্লাইট বা রেসে যান তাদের দ্বারা এই ধরনের বিশেষ প্যাকেজিংকে অবহেলা করা উচিত নয়। এটি একাধিকবার আপনার প্রিয় ট্রান্সমিটারকে আঘাত এবং ধ্বংস থেকে বাঁচাবে, যা, বহু বছর ধরে আপনাকে পরিবেশন করে, আপনার ছেলের উত্তরাধিকারসূত্রে হতে পারে।
ক্যাম্বার কোণ
নেতিবাচক ক্যাম্বার চাকা.
ক্যাম্বার কোণচাকার উল্লম্ব অক্ষ এবং গাড়ির উল্লম্ব অক্ষের মধ্যবর্তী কোণ যখন গাড়ির সামনে বা পিছনের দিক থেকে দেখা হয়। যদি চাকার উপরের অংশ চাকার নীচের চেয়ে আরও বাইরের দিকে থাকে, তাকে বলা হয় ইতিবাচক পতন।চাকার নিচের অংশ যদি চাকার উপরের অংশের চেয়ে আরও বাইরের দিকে থাকে, তাকে বলে নেতিবাচক পতন।
ক্যাম্বার কোণ গাড়ির পরিচালনার বৈশিষ্ট্যকে প্রভাবিত করে। একটি সাধারণ নিয়ম হিসাবে, ক্রমবর্ধমান নেতিবাচক ক্যাম্বার কর্নারিং করার সময় সেই চাকার উপর গ্রিপ উন্নত করে (নির্দিষ্ট সীমার মধ্যে)। কারণ এটি আমাদেরকে একটি টায়ার দেয় যেখানে কর্নারিং ফোর্সের আরও ভালো বণ্টন করা হয়, রাস্তার একটি আরও অনুকূল কোণ, যোগাযোগের প্যাচ বৃদ্ধি করে এবং টায়ারের মধ্য দিয়ে পার্শ্বীয় শক্তির মাধ্যমে না হয়ে টায়ারের উল্লম্ব সমতলের মধ্য দিয়ে শক্তি প্রেরণ করে। নেতিবাচক ক্যাম্বার ব্যবহার করার আরেকটি কারণ হল রাবার টায়ারের কর্নারিং করার সময় নিজের উপর গড়িয়ে যাওয়ার প্রবণতা। যদি চাকাতে শূন্য ক্যাম্বার থাকে, তাহলে টায়ারের কন্টাক্ট প্যাচের ভেতরের প্রান্তটি মাটি থেকে উঠতে শুরু করে, এইভাবে যোগাযোগের প্যাচের এলাকা হ্রাস করে। নেতিবাচক ক্যাম্বার ব্যবহার করে, এই প্রভাব হ্রাস করা হয়, এইভাবে টায়ারের যোগাযোগের প্যাচকে সর্বাধিক করে তোলে।
অন্যদিকে, সর্বাধিক সরল-রেখার ত্বরণের জন্য, ক্যাম্বার কোণ শূন্য হলে এবং টায়ার ট্রেড রাস্তার সমান্তরাল হলে সর্বাধিক গ্রিপ পাওয়া যাবে। সঠিক ক্যাম্বার বিতরণ সাসপেনশন ডিজাইনের একটি প্রধান ফ্যাক্টর, এবং শুধুমাত্র একটি আদর্শ জ্যামিতিই নয়, সাসপেনশন উপাদানগুলির প্রকৃত আচরণও অন্তর্ভুক্ত করা উচিত: ফ্লেক্স, বিকৃতি, স্থিতিস্থাপকতা ইত্যাদি।
বেশির ভাগ গাড়িরই কিছু ধরনের ডাবল-আর্ম সাসপেনশন থাকে যা আপনাকে ক্যাম্বার অ্যাঙ্গেল (পাশাপাশি ক্যাম্বার লাভ) সামঞ্জস্য করতে দেয়।
ক্যাম্বার ইনটেক

ক্যাম্বার লাভ হল সাসপেনশন সংকুচিত হওয়ার সাথে সাথে ক্যাম্বার কোণ কীভাবে পরিবর্তিত হয় তার একটি পরিমাপ। এটি সাসপেনশন বাহুগুলির দৈর্ঘ্য এবং উপরের এবং নীচের সাসপেনশন বাহুগুলির মধ্যে কোণ দ্বারা নির্ধারিত হয়। উপরের এবং নীচের সাসপেনশন বাহুগুলি সমান্তরাল হলে, সাসপেনশন সংকুচিত হলে ক্যাম্বার পরিবর্তন হবে না। যদি সাসপেনশন বাহুগুলির মধ্যে কোণটি উল্লেখযোগ্য হয় তবে সাসপেনশনটি সংকুচিত হওয়ার সাথে সাথে ক্যাম্বারটি বৃদ্ধি পাবে।
একটি নির্দিষ্ট পরিমাণ ক্যাম্বার লাভ টায়ারের পৃষ্ঠকে মাটির সমান্তরাল রাখতে কাজে লাগে যখন গাড়িটি একটি কোণে ব্যাঙ্ক করা হয়।
বিঃদ্রঃ:সাসপেনশন বাহুগুলি চাকার পাশের চেয়ে ভিতরে (গাড়ির পাশে) সমান্তরাল বা কাছাকাছি হতে হবে। সাসপেনশন বাহুগুলি থাকা যা গাড়ির পাশের চেয়ে চাকার পাশে একসাথে কাছাকাছি থাকে এর ফলে ক্যাম্বার কোণে একটি তীব্র পরিবর্তন হবে (গাড়িটি অনিয়মিত আচরণ করবে)।
ক্যাম্বার লাভ গাড়ির রোল সেন্টার কীভাবে আচরণ করে তা নির্ধারণ করবে। একটি গাড়ির রোল সেন্টার, পালাক্রমে, কোণার করার সময় ওজন কীভাবে স্থানান্তরিত হবে তা নির্ধারণ করে এবং এটি পরিচালনার উপর একটি উল্লেখযোগ্য প্রভাব ফেলে (পরে এটি সম্পর্কে আরও)।
কাস্টার অ্যাঙ্গেল

কাস্টার (বা কাস্টার) কোণ হল গাড়ির চাকা সাসপেনশনের উল্লম্ব অক্ষ থেকে কৌণিক বিচ্যুতি, যা সামনে এবং পিছনের দিকে পরিমাপ করা হয় (গাড়ির পাশ থেকে চাকার স্টাব অ্যাক্সেলের কোণটি দেখা হলে)। এটি কব্জা রেখার মধ্যে কোণ (একটি গাড়িতে, একটি কাল্পনিক রেখা যা উপরের বলের জয়েন্টের মধ্য দিয়ে নীচের বলের জয়েন্টের কেন্দ্রে চলে) এবং উল্লম্ব। নির্দিষ্ট ড্রাইভিং পরিস্থিতিতে গাড়ির হ্যান্ডলিং অপ্টিমাইজ করার জন্য কাস্টার কোণটি সামঞ্জস্য করা যেতে পারে।
আর্টিকুলেটিং হুইল পিভট পয়েন্টগুলি এমনভাবে ঝুঁকছে যে তাদের মাধ্যমে আঁকা একটি রেখা চাকার যোগাযোগ বিন্দুর সামনে রাস্তার পৃষ্ঠকে সামান্য ছেদ করে। এর উদ্দেশ্য হল কিছুটা স্ব-কেন্দ্রিক স্টিয়ারিং প্রদান করা - চাকাটি চাকার স্টিয়ার অক্ষের পিছনে ঘূর্ণায়মান। এটি গাড়িটিকে নিয়ন্ত্রণ করা সহজ করে তোলে এবং স্ট্রেইটগুলিতে এর স্থায়িত্ব উন্নত করে (ট্র্যাজেক্টোরি থেকে বিচ্যুত হওয়ার প্রবণতা হ্রাস করে)। অত্যধিক ঢালাই কোণ হ্যান্ডলিংকে ভারী এবং কম প্রতিক্রিয়াশীল করে তুলবে, তবে, অফ-রোড প্রতিযোগিতায়, কর্নারিং করার সময় ক্যাম্বার লাভ উন্নত করতে উচ্চ ক্যাস্টার অ্যাঙ্গেল ব্যবহার করা হয়।
কনভারজেন্স (টো-ইন) এবং ডাইভারজেন্স (টো-আউট)


টো হল প্রতিসাম্য কোণ যা প্রতিটি চাকা গাড়ির অনুদৈর্ঘ্য অক্ষের সাথে তৈরি করে। কনভারজেন্স হল যখন চাকার সামনের দিকটি গাড়ির কেন্দ্রীয় অক্ষের দিকে পরিচালিত হয়।
সামনের পায়ের আঙ্গুলের কোণ
মূলত, বর্ধিত পায়ের আঙ্গুলগুলি (পিছনের তুলনায় সামনের অংশগুলি একসাথে কাছাকাছি) কিছু ধীর কর্নারিং প্রতিক্রিয়ার খরচে আরও সরল-রেখার স্থিতিশীলতা প্রদান করে, সেইসাথে চাকাগুলি এখন কিছুটা পাশের দিকে যাওয়ার কারণে কিছুটা বেশি টেনে আনে।
সামনের চাকায় টো-ইন করার ফলে আরও প্রতিক্রিয়াশীল হ্যান্ডলিং এবং দ্রুত কর্নার এন্ট্রি হবে। যাইহোক, সামনের পায়ের আঙ্গুলের অর্থ সাধারণত কম স্থিতিশীল গাড়ি (বেশি ঝাঁকুনি)।
পিছনের পায়ের আঙ্গুলের কোণ
আপনার গাড়ির পিছনের চাকাগুলি সর্বদা কিছু ডিগ্রী টো-ইন-এর সাথে সামঞ্জস্য করা উচিত (যদিও 0-ডিগ্রী টো-ইন কিছু শর্তে গ্রহণযোগ্য)। মূলত, পিছনের পায়ের আঙুল যত বড় হবে, গাড়ি তত বেশি স্থিতিশীল হবে। যাইহোক, মনে রাখবেন যে পায়ের আঙ্গুলের কোণ (সামনে বা পিছনে) বাড়ানোর ফলে স্ট্রেটে গতি কমে যাবে (বিশেষ করে স্টক মোটর ব্যবহার করার সময়)।
আরেকটি সম্পর্কিত ধারণা হল যে একটি সোজা অংশের জন্য উপযুক্ত একটি পায়ের আঙুলটি বাঁক নেওয়ার জন্য উপযুক্ত হবে না, কারণ ভিতরের চাকাটি বাইরের চাকার চেয়ে একটি ছোট ব্যাসার্ধে চলতে হবে। এর ক্ষতিপূরণের জন্য, স্টিয়ারিং সংযোগগুলি সাধারণত কমবেশি স্টিয়ারিংয়ের জন্য অ্যাকারম্যান নীতি অনুসরণ করে, একটি নির্দিষ্ট গাড়ির মডেলের বৈশিষ্ট্য অনুসারে পরিবর্তিত হয়।
অ্যাকারম্যান কোণ

স্টিয়ারিং-এ অ্যাকারম্যান নীতি হল একটি গাড়ির টাই রডের জ্যামিতিক বিন্যাস যা ভিতরের এবং বাইরের চাকাগুলিকে পালাক্রমে বিভিন্ন ব্যাসার্ধ অনুসরণ করার সমস্যা সমাধানের জন্য ডিজাইন করা হয়েছে।
যখন একটি গাড়ি বাঁক নেয়, তখন এটি একটি পথ অনুসরণ করে যা তার বাঁক বৃত্তের অংশ, পিছনের অক্ষের মধ্য দিয়ে একটি লাইন বরাবর কোথাও কেন্দ্রীভূত হয়। ঘুরানো চাকাগুলিকে কাত করা উচিত যাতে তারা উভয়ই বৃত্তের কেন্দ্র থেকে চাকার কেন্দ্রের মধ্য দিয়ে একটি রেখা দিয়ে 90 ডিগ্রি কোণ তৈরি করে। যেহেতু মোড়ের বাইরের চাকাটি মোড়ের ভিতরের চাকার চেয়ে একটি বড় ব্যাসার্ধে থাকবে, তাই এটি অবশ্যই একটি ভিন্ন কোণে ঘুরতে হবে।
স্টিয়ারিংয়ে অ্যাকারম্যান নীতি স্বয়ংক্রিয়ভাবে স্টিয়ারিং জয়েন্টগুলিকে ভিতরের দিকে সরানোর মাধ্যমে এটি পরিচালনা করবে যাতে তারা চাকার পিভট এবং পিছনের অ্যাক্সেলের কেন্দ্রের মধ্যে আঁকা একটি রেখায় থাকে। স্টিয়ারিং জয়েন্টগুলি একটি অনমনীয় রড দ্বারা সংযুক্ত থাকে, যা স্টিয়ারিং প্রক্রিয়ার অংশ। এই বিন্যাসটি নিশ্চিত করে যে ঘূর্ণনের যেকোন কোণে, চাকার দ্বারা অনুসরণ করা বৃত্তগুলির কেন্দ্রগুলি একটি সাধারণ বিন্দুতে থাকবে।
স্লিপ কোণ

স্লিপ অ্যাঙ্গেল হল চাকার প্রকৃত পথ এবং এটি যে দিকে নির্দেশ করছে তার মধ্যবর্তী কোণ। স্লিপ কোণের ফলে চাকা ভ্রমণের দিকে লম্বভাবে একটি পার্শ্বীয় বল তৈরি হয় - কৌণিক বল। এই কৌণিক বলটি স্লিপ কোণের প্রথম কয়েক ডিগ্রির জন্য প্রায় রৈখিকভাবে বৃদ্ধি পায় এবং তারপরে অ-রৈখিকভাবে সর্বাধিক পর্যন্ত বৃদ্ধি পায়, তারপরে এটি হ্রাস পেতে শুরু করে (চাকাটি পিছলে যেতে শুরু করে)।
টায়ার বিকৃতির ফলে একটি অ-শূন্য স্লিপ কোণ হয়। চাকা ঘোরার সাথে সাথে টায়ারের কন্টাক্ট প্যাচ এবং রাস্তার মধ্যে ঘর্ষণ শক্তির কারণে ট্র্যাডের পৃথক "উপাদান" (ট্রেডের অসীম ছোট অংশ) রাস্তার সাপেক্ষে স্থির থাকে।
টায়ারের এই বিচ্যুতির ফলে স্লিপ অ্যাঙ্গেল এবং কর্নার ফোর্স বৃদ্ধি পায়।
যেহেতু গাড়ির ওজন থেকে চাকার উপর কাজ করে এমন শক্তিগুলি অসমভাবে বিতরণ করা হয়, তাই প্রতিটি চাকার স্লিপ কোণ আলাদা হবে। স্লিপ অ্যাঙ্গেলগুলির মধ্যে অনুপাত একটি নির্দিষ্ট বাঁকের মধ্যে গাড়ির আচরণ নির্ধারণ করবে। সামনের স্লিপ অ্যাঙ্গেল থেকে রিয়ার স্লিপ অ্যাঙ্গেলের অনুপাত 1:1-এর বেশি হলে, গাড়িটি আন্ডারস্টিয়ারের প্রবণ হবে, এবং যদি অনুপাত 1:1-এর কম হয়, তাহলে এটি ওভারস্টিয়ারকে উৎসাহিত করবে। প্রকৃত তাত্ক্ষণিক স্লিপ কোণ রাস্তার অবস্থা সহ অনেক কারণের উপর নির্ভর করে, তবে একটি গাড়ির সাসপেনশন নির্দিষ্ট গতিশীল কর্মক্ষমতা প্রদানের জন্য ডিজাইন করা যেতে পারে।
ফলস্বরূপ স্লিপ কোণগুলি সামঞ্জস্য করার প্রধান উপায় হল সামনে এবং পিছনের পার্শ্বীয় ওজন স্থানান্তরের পরিমাণ সামঞ্জস্য করে আপেক্ষিক সামনে থেকে পিছনের রোল পরিবর্তন করা। এটি রোল কেন্দ্রগুলির উচ্চতা পরিবর্তন করে, বা রোলের কঠোরতা সামঞ্জস্য করে, সাসপেনশন পরিবর্তন করে বা অ্যান্টি-রোল বার যুক্ত করে অর্জন করা যেতে পারে।
ওজন স্থানান্তর
ওজন স্থানান্তর ত্বরণ (অনুদৈর্ঘ্য এবং পার্শ্বীয়) প্রয়োগের সময় প্রতিটি চাকা দ্বারা সমর্থিত ওজনের পুনর্বণ্টনকে বোঝায়। এর মধ্যে রয়েছে ত্বরণ, ব্রেক বা বাঁক। একটি গাড়ির গতিশীলতা বোঝার জন্য ওজন স্থানান্তর বোঝা গুরুত্বপূর্ণ।
গাড়ির কৌশলের সময় মাধ্যাকর্ষণ কেন্দ্র (CoG) স্থানান্তরিত হওয়ার কারণে ওজন স্থানান্তর ঘটে। ত্বরণের কারণে ভরের কেন্দ্র জ্যামিতিক অক্ষের চারপাশে ঘোরে, যার ফলে মাধ্যাকর্ষণ কেন্দ্রের স্থানচ্যুতি ঘটে (CoG)। সামনে থেকে পিছনের ওজন স্থানান্তরটি গাড়ির হুইলবেসের মাধ্যাকর্ষণ কেন্দ্রের উচ্চতার অনুপাতের সমানুপাতিক এবং পার্শ্বীয় ওজন স্থানান্তর (মোট সামনে এবং পিছনে) মাধ্যাকর্ষণ কেন্দ্রের উচ্চতার অনুপাতের সমানুপাতিক। গাড়ির ট্র্যাক, সেইসাথে এর রোল সেন্টারের উচ্চতা (পরে ব্যাখ্যা করা হয়েছে)।
উদাহরণস্বরূপ, যখন একটি গাড়ি ত্বরান্বিত হয়, তখন এর ওজন পিছনের চাকায় স্থানান্তরিত হয়। গাড়িটি লক্ষণীয়ভাবে পিছনের দিকে ঝুঁকে বা "ক্রুচ" হিসাবে আপনি এটি দেখতে পারেন। বিপরীতভাবে, ব্রেক করার সময়, ওজন সামনের চাকার দিকে স্থানান্তরিত হয় (নাক "ডাইভ" মাটিতে)। একইভাবে, দিক পরিবর্তনের সময় (পার্শ্বিক ত্বরণ), ওজন টার্নের বাইরে স্থানান্তরিত হয়।
ওজন স্থানান্তরের ফলে গাড়ির ব্রেক, ত্বরণ বা বাঁক নেওয়ার সময় চারটি চাকার উপলব্ধ ট্র্যাকশনের পরিবর্তন ঘটে। উদাহরণস্বরূপ, যেহেতু ব্রেকিংয়ের কারণে ওজন সামনের দিকে স্থানান্তরিত হয়, সামনের চাকাগুলি ব্রেকিংয়ের বেশিরভাগ "কাজ" করে। এই "কাজ" অন্য চাকার থেকে এক জোড়া চাকার পরিবর্তনের ফলে মোট উপলব্ধ ট্র্যাকশনের ক্ষতি হয়।
পাশ্বর্ীয় ওজন স্থানান্তর যদি গাড়ির এক প্রান্তে চাকার লোড পর্যন্ত পৌঁছায়, তাহলে সেই প্রান্তে অভ্যন্তরীণ চাকা উঠবে, যা পরিচালনার বৈশিষ্ট্যে পরিবর্তন ঘটায়। এই ওজন স্থানান্তর যদি গাড়ির ওজনের অর্ধেক পৌঁছায়, তাহলে এটি গড়িয়ে যেতে শুরু করে। কিছু বড় ট্রাক স্কিডিংয়ের আগে উল্টে যাবে এবং রাস্তার গাড়িগুলি সাধারণত রাস্তা ছেড়ে যাওয়ার সময়ই উল্টে যায়।
রোল সেন্টার
একটি গাড়ির রোল সেন্টার হল একটি কাল্পনিক বিন্দু যা সামনের (বা পিছনে) থেকে দেখা হলে যে কেন্দ্রের চারপাশে গাড়ি ঘুরছে (পালাক্রমে) তা চিহ্নিত করে।
জ্যামিতিক রোল সেন্টারের অবস্থান শুধুমাত্র সাসপেনশনের জ্যামিতি দ্বারা নির্ধারিত হয়। রোল সেন্টারের অফিসিয়াল সংজ্ঞা হল: "যেকোন জোড়া চাকা কেন্দ্রের মধ্য দিয়ে ক্রস সেকশনের বিন্দু যেখানে সাসপেনশন রোল না ঘটিয়ে স্প্রিং ভরে পার্শ্বীয় বল প্রয়োগ করা যেতে পারে।"
রোল সেন্টারের মান তখনই অনুমান করা যায় যখন গাড়ির মাধ্যাকর্ষণ কেন্দ্রকে বিবেচনা করা হয়। ভরের কেন্দ্র এবং রোলের কেন্দ্রের অবস্থানের মধ্যে পার্থক্য থাকলে একটি "মোমেন্টাম আর্ম" তৈরি হয়। যখন একটি গাড়ী একটি কোণে পার্শ্বীয় ত্বরণ অনুভব করে, তখন রোল কেন্দ্রটি উপরে বা নিচে চলে যায় এবং স্প্রিংস এবং অ্যান্টি-রোল বারগুলির কঠোরতার সাথে মিলিত মুহূর্তের বাহুর আকার কোণে রোলের পরিমাণ নির্দেশ করে।
গাড়ির জ্যামিতিক রোল সেন্টার নিম্নলিখিত মৌলিক জ্যামিতিক পদ্ধতিগুলি ব্যবহার করে পাওয়া যেতে পারে যখন গাড়িটি স্থির অবস্থায় থাকে: 
সাসপেনশন বাহু (লাল) এর সমান্তরাল কাল্পনিক রেখা আঁকুন। তারপরে লাল রেখাগুলির ছেদ বিন্দু এবং চাকার নীচের কেন্দ্রগুলির মধ্যে কাল্পনিক রেখাগুলি আঁকুন, যেমনটি ছবিতে দেখানো হয়েছে (সবুজে)। এই সবুজ লাইনের ছেদ বিন্দু হল রোল কেন্দ্র।
আপনাকে লক্ষ্য করতে হবে যে সাসপেনশন কম্প্রেস বা উত্তোলনের সময় রোল সেন্টারটি সরে যায়, তাই এটি সত্যিই একটি তাত্ক্ষণিক রোল সেন্টার। সাসপেনশন সংকুচিত হওয়ার সাথে সাথে এই রোল সেন্টারটি কতটা নড়াচড়া করে তা সাসপেনশন বাহুগুলির দৈর্ঘ্য এবং উপরের এবং নীচের সাসপেনশন বাহুগুলির (বা সামঞ্জস্যযোগ্য সাসপেনশন বাহু) এর মধ্যে কোণ দ্বারা নির্ধারিত হয়।
যখন সাসপেনশন সংকুচিত হয়, তখন রোল সেন্টার উচ্চতর হয় এবং মুহূর্তের বাহু (রোল সেন্টার এবং গাড়ির মাধ্যাকর্ষণ কেন্দ্রের মধ্যে দূরত্ব (চিত্রে CoG)) হ্রাস পাবে। এর অর্থ হল যখন সাসপেনশন সংকুচিত হয় (উদাহরণস্বরূপ, কর্নারিং করার সময়), গাড়ির রোল করার প্রবণতা কম থাকবে (যা আপনি রোল ওভার করতে না চাইলে ভাল)।
উচ্চ গ্রিপ (মাইক্রোপোরাস রাবার) সহ টায়ারগুলি ব্যবহার করার সময়, আপনার সাসপেনশন বাহুগুলি এমনভাবে সেট করা উচিত যাতে সাসপেনশন সংকুচিত হলে রোল কেন্দ্রটি উল্লেখযোগ্যভাবে বৃদ্ধি পায়। আইসিই রোড কারগুলিতে খুব আক্রমনাত্মক সাসপেনশন আর্ম অ্যাঙ্গেল থাকে যা রোল সেন্টারকে কর্নারিং করার সময় বাড়ায় এবং ফোম টায়ার ব্যবহার করার সময় রোলওভার প্রতিরোধ করে।
সমান্তরাল, সমান দৈর্ঘ্যের সাসপেনশন বাহুগুলি ব্যবহার করে একটি নির্দিষ্ট রোল কেন্দ্রে পরিণত হয়। এর মানে হল যে গাড়িটি ঝুঁকে পড়ার সাথে সাথে বাহু গাড়িটিকে আরও বেশি করে রোল করতে বাধ্য করবে। একটি সাধারণ নিয়ম হিসাবে, আপনার গাড়ির মাধ্যাকর্ষণ কেন্দ্র যত বেশি হবে, রোলওভারগুলি এড়াতে রোল সেন্টার তত বেশি হওয়া উচিত।
"বাম্প স্টিয়ার" হল একটি চাকা ঘোরার প্রবণতা যখন এটি সাসপেনশন ট্র্যাভেলের উপরে চলে যায়। বেশিরভাগ গাড়ির মডেলে, সাসপেনশন সংকুচিত হওয়ার সাথে সাথে সামনের চাকাগুলি সাধারণত টো-আউট অনুভব করে (চাকার সামনের অংশ বাইরের দিকে চলে যায়)। এটি রোলিং করার সময় আন্ডারস্টিয়ার প্রদান করে (যখন আপনি কোণায় ঠোঁটে আঘাত করেন, তখন গাড়িটি সোজা হয়ে যায়)। অতিরিক্ত "বাম্প স্টিয়ার" টায়ার পরিধান বাড়ায় এবং রুক্ষ রাস্তায় গাড়িকে ঝাঁকুনি দেয়।
"বাম্প স্টিয়ার" এবং রোল সেন্টার
একটি বাম্পে, উভয় চাকা একসাথে উত্তোলন করে। যখন আপনি রোল করেন, একটি চাকা উপরে যায় এবং অন্যটি নিচে যায়। সাধারণত এটি একটি চাকায় আরও বেশি টো-ইন এবং অন্য চাকায় আরও বেশি বিচ্যুতি তৈরি করে, এইভাবে একটি টার্নিং ইফেক্ট তৈরি করে। সাধারণ বিশ্লেষণে, আপনি সহজভাবে অনুমান করতে পারেন যে রোল স্টিয়ারটি "বাম্প স্টিয়ার" এর সাথে সাদৃশ্যপূর্ণ, তবে অনুশীলনে অ্যান্টি-রোল বারগুলির মতো জিনিসগুলির একটি প্রভাব রয়েছে যা এটিকে পরিবর্তন করে।
"বাম্প স্টিয়ার" বাইরের পিভট বাড়িয়ে বা ভিতরের পিভট কমিয়ে বাড়ানো যেতে পারে। সাধারণত সামান্য সমন্বয় প্রয়োজন হয়.
আন্ডারস্টিয়ার
আন্ডারস্টিয়ার হল একটি বাঁক নিয়ে গাড়ি পরিচালনার একটি শর্ত, যেখানে চাকার দিক নির্দেশিত বৃত্তের চেয়ে গাড়ির বৃত্তাকার পথের ব্যাস লক্ষণীয়ভাবে বড়। এই প্রভাব oversteer এবং মধ্যে বিপরীত সহজ কথাআন্ডারস্টিয়ার হল এমন একটি অবস্থা যেখানে সামনের চাকাগুলি চালকের দ্বারা কর্নারিং করার জন্য সেট করা পথ অনুসরণ করে না, বরং আরও সোজা পথ অনুসরণ করে।
এটি প্রায়ই ঠেলাঠেলি বা ঘুরতে অস্বীকার হিসাবে উল্লেখ করা হয়। গাড়িটিকে "টাইট" বলা হয় কারণ এটি স্থিতিশীল এবং স্কিডিং থেকে অনেক দূরে।
ওভারস্টিয়ারের মতো, আন্ডারস্টিয়ারের অনেকগুলি উত্স রয়েছে যেমন যান্ত্রিক ট্র্যাকশন, এরোডাইনামিকস এবং সাসপেনশন।
প্রথাগতভাবে, আন্ডারস্টিয়ার ঘটে যখন সামনের চাকার মোড়ের সময় পর্যাপ্ত গ্রিপ থাকে না, তাই গাড়ির সামনের অংশে যান্ত্রিক গ্রিপ কম থাকে এবং টার্নের মধ্য দিয়ে লাইন অনুসরণ করতে পারে না।
ক্যাম্বার অ্যাঙ্গেল, রাইডের উচ্চতা এবং মাধ্যাকর্ষণ কেন্দ্র গুরুত্বপূর্ণ কারণ যা আন্ডারস্টিয়ার/ওভারস্টিয়ারের অবস্থা নির্ধারণ করে।
এটি একটি সাধারণ নিয়ম যে নির্মাতারা ইচ্ছাকৃতভাবে গাড়িগুলিকে একটু আন্ডারস্টিয়ার রাখার জন্য টিউন করে। যদি একটি গাড়ির সামান্য আন্ডারস্টিয়ার থাকে, তবে দিক পরিবর্তন করার সময় এটি আরও স্থিতিশীল (গড় চালকের ক্ষমতার মধ্যে)।
আন্ডারস্টিয়ার কমাতে আপনার গাড়ি কীভাবে সামঞ্জস্য করবেন
আপনার সামনের চাকার নেতিবাচক ক্যাম্বার বাড়িয়ে শুরু করা উচিত (অন-রোড গাড়ির জন্য কখনই -3 ডিগ্রি এবং অফ-রোড গাড়ির জন্য 5-6 ডিগ্রির বেশি হবে না)।
আন্ডারস্টিয়ার কমানোর আরেকটি উপায় হল নেতিবাচক ক্যাম্বার কমানো (যা সবসময় হওয়া উচিত<=0 градусов).
আন্ডারস্টিয়ার কমানোর আরেকটি উপায় হল সামনের অ্যান্টি-রোল বারকে শক্ত করা বা সরিয়ে দেওয়া (বা পিছনের অ্যান্টি-রোল বারকে শক্ত করা)।
এটা মনে রাখা গুরুত্বপূর্ণ যে কোনো সমন্বয় আপস সাপেক্ষে। একটি গাড়িতে সীমিত পরিমাণ মোট ট্র্যাকশন থাকে যা সামনের এবং পিছনের চাকার মধ্যে বিতরণ করা যেতে পারে।
ওভারস্টিয়ার
পিছনের চাকা সামনের চাকার পিছনে না গিয়ে বরং টার্নের বাইরের দিকে স্লাইড করলে গাড়িটি ওভারস্টিয়ার করা হয়। Oversteer একটি স্কিড হতে পারে.
একটি গাড়ির ওভারস্টিয়ার করার প্রবণতা যান্ত্রিক ক্লাচ, এরোডাইনামিকস, সাসপেনশন এবং ড্রাইভিং শৈলীর মতো বিভিন্ন কারণ দ্বারা প্রভাবিত হয়।
ওভারস্টিয়ার সীমাটি ঘটে যখন পিছনের টায়ারগুলি সামনের টায়ারগুলি করার আগে একটি টার্নের সময় তাদের পার্শ্বীয় ট্র্যাকশন সীমা অতিক্রম করে, এইভাবে গাড়ির পিছনের অংশটি টার্নের বাইরের দিকে নির্দেশ করে। সাধারণ অর্থে, ওভারস্টিয়ার হল এমন একটি অবস্থা যেখানে পিছনের টায়ারের স্লিপ কোণ সামনের টায়ারের স্লিপ কোণকে ছাড়িয়ে যায়।
রিয়ার হুইল ড্রাইভ গাড়িগুলি ওভারস্টিয়ারের প্রবণতা বেশি, বিশেষ করে যখন শক্ত কোণে থ্রটল ব্যবহার করে। কারণ পেছনের টায়ারগুলোকে ইঞ্জিনের সাইড ফোর্স এবং থ্রাস্ট সহ্য করতে হয়।
একটি গাড়ির ওভারস্টিয়ার করার প্রবণতা সাধারণত সামনের সাসপেনশনকে নরম করে বা পিছনের সাসপেনশনকে শক্ত করে (বা পিছনের অ্যান্টি-রোল বার যোগ করে) বৃদ্ধি পায়। ক্যাম্বার অ্যাঙ্গেল, রাইডের উচ্চতা এবং টায়ারের তাপমাত্রা রেটিংও গাড়ির ভারসাম্য বজায় রাখতে ব্যবহার করা যেতে পারে।
একটি ওভারস্টিয়ার করা গাড়িকে "লুজ" বা "আনলক" হিসাবেও উল্লেখ করা যেতে পারে।
ওভারস্টিয়ার এবং আন্ডারস্টিয়ারের মধ্যে আপনি কীভাবে পার্থক্য করবেন?
যখন আপনি একটি কোণে প্রবেশ করেন, তখন ওভারস্টিয়ার হল যখন গাড়িটি আপনার প্রত্যাশার চেয়ে শক্ত হয়ে যায় এবং আন্ডারস্টিয়ার হল যখন গাড়িটি আপনার প্রত্যাশার চেয়ে কম ঘুরবে৷
ওভারস্টিয়ার নাকি আন্ডারস্টিয়ার, এটাই প্রশ্ন
পূর্বে উল্লিখিত হিসাবে, কোনো সমন্বয় আপস সাপেক্ষে. গাড়িটির সীমিত গ্রিপ রয়েছে যা সামনের এবং পিছনের চাকার মধ্যে ভাগ করা যেতে পারে (এটি অ্যারোডাইনামিকসের সাথে বাড়ানো যেতে পারে, তবে এটি অন্য গল্প)।
সমস্ত স্পোর্টস কার চাকা যে দিকে নির্দেশ করছে তার চেয়ে উচ্চতর পার্শ্বীয় (অর্থাৎ সাইড স্লিপ) গতি বিকাশ করে। চাকাগুলি যে বৃত্তটি ঘূর্ণায়মান করছে এবং তারা যে দিকে নির্দেশ করছে তার মধ্যে পার্থক্য হল স্লিপ কোণ। সামনের এবং পিছনের চাকার স্লিপ কোণ একই হলে, গাড়ির একটি নিরপেক্ষ হ্যান্ডলিং ব্যালেন্স থাকে। সামনের চাকার স্লিপ কোণ যদি পিছনের চাকার স্লিপ কোণ থেকে বেশি হয়, তাহলে গাড়িটিকে কম স্টিয়ার করা হয়। যদি পিছনের চাকার স্লিপ কোণ সামনের চাকার স্লিপ কোণকে ছাড়িয়ে যায়, গাড়িটিকে ওভারস্টিয়ার করা বলা হয়।
শুধু মনে রাখবেন যে একটি আন্ডারস্টিয়ার গাড়ী সামনের গার্ড্রেলের সাথে সংঘর্ষ হয়, একটি ওভারস্টিয়ার গাড়ী পিছনের গার্ডরেলের সাথে সংঘর্ষ হয় এবং নিরপেক্ষ হ্যান্ডলিং সহ একটি গাড়ী একই সময়ে উভয় প্রান্তে গার্ড্রেলকে স্পর্শ করে।
অন্যান্য গুরুত্বপূর্ণ ফ্যাক্টর বিবেচনা করা
রাস্তার অবস্থা, গতি, উপলব্ধ ট্র্যাকশন এবং ড্রাইভার ইনপুটের উপর নির্ভর করে যে কোনও গাড়ি আন্ডারস্টিয়ার বা ওভারস্টিয়ার অনুভব করতে পারে। গাড়ির ডিজাইনে, তবে, একটি স্বতন্ত্র "সীমা" শর্ত থাকে যেখানে গাড়ি পৌঁছায় এবং গ্রিপ সীমা অতিক্রম করে। "আলটিমেট আন্ডারস্টিয়ার" এমন একটি গাড়িকে বোঝায় যেটি ডিজাইন অনুসারে, যখন কৌণিক ত্বরণ টায়ারের গ্রিপ অতিক্রম করে তখন আন্ডারস্টিয়ার হয়ে যায়।
হ্যান্ডলিং ব্যালেন্স লিমিট হল সামনে/পিছনের আপেক্ষিক রোল প্রতিরোধের (সাসপেনশন কঠোরতা), সামনে/পিছনের ওজন বন্টন এবং সামনের/পিছনের টায়ার গ্রিপ। একটি ভারী সামনের প্রান্ত এবং কম পিছনের রোল প্রতিরোধের (নরম স্প্রিংস এবং/অথবা কম কঠোরতা বা পিছনের অ্যান্টি-রোল বারগুলির অভাবের কারণে) একটি গাড়ি সামান্যভাবে আন্ডারস্টিয়ারের প্রবণতা দেখাবে: এর সামনের টায়ারগুলি, স্থির থাকা সত্ত্বেও আরও বেশি লোড করা হবে। পিছনের টায়ারের চেয়ে আগে তাদের গ্রিপের সীমাতে পৌঁছায় এবং এইভাবে বড় স্লিপ অ্যাঙ্গেল তৈরি করে। ফ্রন্ট-হুইল ড্রাইভ কারগুলিও আন্ডারস্টিয়ারের প্রবণতা রয়েছে, কারণ তাদের কেবলমাত্র সামনের প্রান্তটি ভারী থাকে না, তবে সামনের চাকায় শক্তি দেওয়ার ফলে কর্নারিংয়ের জন্য তাদের উপলব্ধ ট্র্যাকশনও হ্রাস পায়। ইঞ্জিন থেকে রাস্তা এবং স্টিয়ারিং-এ পাওয়ার স্থানান্তরের কারণে ট্র্যাকশন অপ্রত্যাশিতভাবে পরিবর্তিত হওয়ায় এটি প্রায়শই সামনের চাকার উপর "কাঁপানো" প্রভাবের পরিণতি পায়।
যদিও আন্ডারস্টিয়ার এবং ওভারস্টিয়ার উভয়ই নিয়ন্ত্রণ হারাতে পারে, অনেক নির্মাতারা তাদের গাড়িগুলিকে চরম আন্ডারস্টিয়ারের জন্য ডিজাইন করেন এই ধারণার ভিত্তিতে যে গড় চালকের পক্ষে চরম ওভারস্টিয়ারের চেয়ে নিয়ন্ত্রণ করা সহজ। চরম ওভারস্টিয়ারের বিপরীতে, যার জন্য প্রায়শই বেশ কয়েকটি স্টিয়ারিং সামঞ্জস্যের প্রয়োজন হয়, আন্ডারস্টিয়ার প্রায়শই গতি হ্রাস করে হ্রাস করা যেতে পারে।
আন্ডারস্টিয়ার শুধুমাত্র একটি কোণে ত্বরণের সময় ঘটতে পারে না, এটি হার্ড ব্রেকিংয়ের সময়ও ঘটতে পারে। যদি ব্রেক ব্যালেন্স (সামনের এবং পিছনের অ্যাক্সেলগুলিতে ব্রেকিং বল) খুব বেশি এগিয়ে থাকে তবে এটি আন্ডারস্টিয়ারের কারণ হতে পারে। সামনের চাকা লক আপ এবং কার্যকর নিয়ন্ত্রণ হারানোর কারণে এটি ঘটে। বিপরীত প্রভাবও ঘটতে পারে, যদি ব্রেকগুলির ভারসাম্য খুব বেশি পিছনে সরানো হয়, তাহলে গাড়ির পিছনের প্রান্তটি স্কিড হয়ে যায়।
টারমাকের ক্রীড়াবিদরা সাধারণত একটি নিরপেক্ষ ভারসাম্য পছন্দ করেন (ট্র্যাক এবং ড্রাইভিং শৈলীর উপর নির্ভর করে আন্ডারস্টিয়ার বা ওভারস্টিয়ারের প্রতি সামান্য প্রবণতা সহ), কারণ আন্ডারস্টিয়ার এবং ওভারস্টিয়ার কর্নারিংয়ের সময় গতি হ্রাস করে। রিয়ার হুইল ড্রাইভ কারগুলিতে, আন্ডারস্টিয়ার সাধারণত ভাল ফলাফল দেয়, কারণ পিছনের চাকাগুলিকে কোণার বাইরে ত্বরান্বিত করার জন্য কিছু উপলব্ধ ট্র্যাকশনের প্রয়োজন হয়।
বসন্ত হার
স্প্রিং রেট হল একটি গাড়ির রাইডের উচ্চতা এবং সাসপেনশনের সময় এর অবস্থান সামঞ্জস্য করার একটি টুল। স্প্রিং রেট হল একটি ফ্যাক্টর যা কম্প্রেশন প্রতিরোধের পরিমাণ পরিমাপ করতে ব্যবহৃত হয়।
স্প্রিংগুলি যেগুলি খুব শক্ত বা খুব নরম, এর ফলে গাড়িতে কোনও সাসপেনশন থাকবে না।
স্প্রিং রেট হুইলে কমে গেছে (হুইল রেট)
চাকাকে নির্দেশিত স্প্রিং রেট হল কার্যকর বসন্ত হার যখন চাকায় পরিমাপ করা হয়।
চাকায় প্রয়োগ করা স্প্রিং এর দৃঢ়তা সাধারণত বসন্তের শক্ততার সমান বা উল্লেখযোগ্যভাবে কম। সাধারণত, স্প্রিংগুলি সাসপেনশন আর্মস বা আর্টিকুলেটেড সাসপেনশন সিস্টেমের অন্যান্য অংশে মাউন্ট করা হয়। অনুমান করুন যে যখন চাকাটি 1 ইঞ্চি সরে যায়, তখন স্প্রিং 0.75 ইঞ্চি সরে যায়, লিভারেজ অনুপাত 0.75:1 হবে। চাকার সাপেক্ষে স্প্রিং রেট গণনা করা হয় লিভারেজ রেশিও (0.5625) এর বর্গ করে, স্প্রিং রেট এবং স্প্রিং এর কোণের সাইন দ্বারা গুণ করে। দুটি প্রভাবের কারণে অনুপাতটি বর্গ করা হয়েছে। অনুপাত জোর এবং দূরত্ব ভ্রমণ প্রযোজ্য.
সাসপেনশন ট্রাভেল
সাসপেনশন ট্র্যাভেল হল সাসপেনশন ট্র্যাভেলের নিচ থেকে (যখন গাড়িটি স্ট্যান্ডে থাকে এবং চাকাগুলি অবাধে ঝুলে থাকে) সাসপেনশন ট্র্যাভেলের শীর্ষে (যখন গাড়ির চাকা আর উপরে যেতে পারে না)। যখন একটি চাকা তার নীচে বা উপরের সীমাতে পৌঁছে যায়, তখন এটি গুরুতর নিয়ন্ত্রণ সমস্যা সৃষ্টি করতে পারে। সাসপেনশন ট্রাভেল, চ্যাসিস ইত্যাদি সীমার বাইরে থাকার কারণে "সীমায় পৌঁছেছে" হতে পারে। বা গাড়ির শরীর বা অন্যান্য উপাদান দিয়ে রাস্তা স্পর্শ করা।
স্যাঁতসেঁতে
স্যাঁতসেঁতে জলবাহী শক শোষক ব্যবহারের মাধ্যমে চলাচল বা দোলন নিয়ন্ত্রণ। স্যাঁতসেঁতে গাড়ির সাসপেনশনের গতি এবং প্রতিরোধ ক্ষমতা নিয়ন্ত্রণ করে। একটি আনড্যাম্পড গাড়ি উপরে এবং নীচে দোলাবে। সঠিক স্যাঁতসেঁতে, গাড়িটি ন্যূনতম সময়ের মধ্যে স্বাভাবিক অবস্থায় ফিরে আসবে। আধুনিক গাড়ির স্যাঁতসেঁতে শকগুলিতে তরলের সান্দ্রতা (বা পিস্টনের গর্তের আকার) বৃদ্ধি বা হ্রাস করে নিয়ন্ত্রণ করা যেতে পারে।
অ্যান্টি-ডাইভ এবং অ্যান্টি-স্কোয়াট (অ্যান্টি-ডাইভ এবং অ্যান্টি-স্কোয়াট)
অ্যান্টি-ডাইভ এবং অ্যান্টি-স্কোয়াটকে শতাংশ হিসাবে প্রকাশ করা হয় এবং ব্রেক করার সময় গাড়ির সামনের ডাইভ এবং গতি বাড়াতে গাড়ির পিছনের স্কোয়াটকে বোঝায়। ব্রেকিং এবং ত্বরণের জন্য তাদের যমজ হিসাবে বিবেচনা করা যেতে পারে, যখন রোল সেন্টারের উচ্চতা কোণে কাজ করে। তাদের পার্থক্যের প্রধান কারণ সামনের এবং পিছনের সাসপেনশনের জন্য বিভিন্ন ডিজাইনের লক্ষ্য, যখন সাসপেনশন সাধারণত গাড়ির ডান এবং বাম দিকের মধ্যে প্রতিসম হয়।
অ্যান্টি-ডাইভ এবং অ্যান্টি-স্কোয়াট শতাংশ সবসময় একটি উল্লম্ব সমতলের সাপেক্ষে গণনা করা হয় যা গাড়ির মাধ্যাকর্ষণ কেন্দ্রকে ছেদ করে। আসুন প্রথমে অ্যান্টি-স্কোয়াট দেখুন। গাড়ির পাশ থেকে দেখা হলে পিছনের তাত্ক্ষণিক সাসপেনশন কেন্দ্রের অবস্থান নির্ধারণ করুন। ক্ষণস্থায়ী কেন্দ্রের মাধ্যমে টায়ার যোগাযোগের প্যাচ থেকে একটি লাইন আঁকুন, এটি চাকা বল ভেক্টর হবে। এখন গাড়ির মাধ্যাকর্ষণ কেন্দ্রের মধ্য দিয়ে একটি উল্লম্ব রেখা আঁকুন। অ্যান্টি-স্কোয়াট হল চাকা বল ভেক্টরের ছেদ বিন্দুর উচ্চতা এবং মাধ্যাকর্ষণ কেন্দ্রের উচ্চতার মধ্যে অনুপাত, যা শতাংশ হিসাবে প্রকাশ করা হয়। 50% অ্যান্টি-স্কোয়াট মান মানে ত্বরণের সময় বল ভেক্টর স্থল এবং মাধ্যাকর্ষণ কেন্দ্রের মাঝখানে থাকে। 
অ্যান্টি-ডাইভ হল অ্যান্টি-স্কোয়াটের প্রতিরূপ এবং ব্রেক করার সময় সামনের সাসপেনশনের জন্য কাজ করে।
বাহিনীর বৃত্ত
বাহিনীর বৃত্ত একটি গাড়ির টায়ার এবং রাস্তার পৃষ্ঠের মধ্যে গতিশীল মিথস্ক্রিয়া সম্পর্কে চিন্তা করার একটি কার্যকর উপায়। নীচের চিত্রে, আমরা উপরে থেকে চাকাটি দেখছি, তাই রাস্তার পৃষ্ঠটি x-y সমতলে অবস্থিত। যে গাড়িতে চাকা লাগানো আছে সেটি ধনাত্মক y দিকে চলে। 
এই উদাহরণে, গাড়িটি ডানদিকে ঘুরবে (অর্থাৎ ইতিবাচক x দিকটি মোড়ের কেন্দ্রের দিকে)। লক্ষ্য করুন যে চাকার ঘূর্ণনের সমতলটি চাকাটি যে দিকে চলছে (ধনাত্মক y দিকে) তার আসল দিকের একটি কোণে রয়েছে। এই কোণটি স্লিপ কোণ।
F মান সীমা বিন্দুযুক্ত বৃত্ত দ্বারা সীমিত, F Fx (বাঁক) এবং Fy (ত্বরণ বা হ্রাস) উপাদানগুলির যেকোন সমন্বয় হতে পারে যা ডটেড বৃত্তকে অতিক্রম করে না। ফোর্স Fx এবং Fy এর সংমিশ্রণ সীমার বাইরে হলে, টায়ার গ্রিপ হারাবে (আপনি স্লিপ বা স্কিড)।
এই উদাহরণে, টায়ারটি x দিক (Fx) এ একটি বল উপাদান তৈরি করে যা, সাসপেনশন সিস্টেমের মাধ্যমে গাড়ির চ্যাসিসে প্রেরণ করা হলে, বাকি চাকার অনুরূপ শক্তির সাথে মিলিত হয়ে, গাড়িটিকে স্টিয়ারিং করে অধিকার বৃত্তের বৃত্তের ব্যাস, এবং তাই একটি টায়ার সর্বাধিক অনুভূমিক বল তৈরি করতে পারে, টায়ারের নকশা এবং অবস্থা (বয়স এবং তাপমাত্রার পরিসীমা), রাস্তার পৃষ্ঠের গুণমান এবং চাকার উপর উল্লম্ব লোড সহ অনেকগুলি কারণ দ্বারা প্রভাবিত হয়।
সমালোচনামূলক গতি
একটি আন্ডারস্টিয়ারড গাড়িতে ক্রিটিক্যাল স্পিড নামক অস্থিরতার সহগামী মোড থাকে। আপনি এই গতির কাছে যাওয়ার সাথে সাথে নিয়ন্ত্রণ আরও বেশি সংবেদনশীল হয়ে ওঠে। গুরুতর গতিতে, ইয়াও হার অসীম হয়ে যায়, যার অর্থ চাকা সোজা করেও গাড়িটি ঘুরতে থাকে। সমালোচনামূলক গতির উপরে, একটি সাধারণ বিশ্লেষণ দেখায় যে স্টিয়ারিং কোণটি অবশ্যই বিপরীত হতে হবে (কাউন্টার-স্টিয়ারিং)। একটি আন্ডারস্টিয়ার গাড়ি এটি দ্বারা প্রভাবিত হয় না, এটি একটি কারণ যা উচ্চ-গতির গাড়িগুলিকে আন্ডারস্টিয়ারের জন্য টিউন করা হয়।
সোনালী গড় (বা একটি সুষম গাড়ি) খোঁজা
যে গাড়িটি তার সীমাতে ব্যবহার করার সময় ওভারস্টিয়ার বা আন্ডারস্টিয়ারে ভোগে না তার নিরপেক্ষ ভারসাম্য থাকে। এটা স্বজ্ঞাত বলে মনে হয় যে রেসাররা গাড়ির চারপাশে ঘুরতে একটু ওভারস্টিয়ার পছন্দ করবে, কিন্তু এটি সাধারণত দুটি কারণে ব্যবহৃত হয় না। ত্বরণ তাড়াতাড়ি, একবার গাড়িটি মোড়ের শীর্ষে চলে গেলে, গাড়িটিকে পরবর্তী সোজাতে অতিরিক্ত গতি অর্জন করতে দেয়। যে চালক আগে বা তার বেশি ত্বরান্বিত করে তার একটি বড় সুবিধা রয়েছে। টার্নের এই জটিল পর্যায়ে গাড়িটিকে ত্বরান্বিত করার জন্য পিছনের টায়ারগুলির কিছু অতিরিক্ত ট্র্যাকশনের প্রয়োজন হয়, যখন সামনের টায়ারগুলি তাদের সমস্ত ট্র্যাকশন টার্নে নিবেদিত করতে পারে। অতএব, গাড়িটি আন্ডারস্টিয়ারের সামান্য প্রবণতা সহ সেট আপ করা উচিত বা একটু টাইট হওয়া উচিত। এছাড়াও, একটি ওভারস্টিয়ার করা গাড়ি ঝাঁকুনিপূর্ণ, দীর্ঘ দৌড়ের সময় বা অপ্রত্যাশিত পরিস্থিতিতে প্রতিক্রিয়া করার সময় নিয়ন্ত্রণ হারানোর সম্ভাবনা বাড়িয়ে দেয়।
দয়া করে মনে রাখবেন যে এটি শুধুমাত্র রাস্তার পৃষ্ঠের প্রতিযোগিতার ক্ষেত্রে প্রযোজ্য। মাটির উপর প্রতিযোগিতা সম্পূর্ণ ভিন্ন গল্প।
কিছু সফল চালক তাদের গাড়িতে একটু ওভারস্টিয়ার পছন্দ করে, কম শান্ত গাড়ি পছন্দ করে যা আরও সহজে কোণে যায়। এটি লক্ষ করা উচিত যে গাড়ির নিয়ন্ত্রণযোগ্যতার ভারসাম্য সম্পর্কে রায়টি উদ্দেশ্যমূলক নয়। ড্রাইভিং শৈলী একটি গাড়ির আপাত ভারসাম্যের একটি প্রধান কারণ। অতএব, অভিন্ন গাড়ির সাথে দুটি চালক প্রায়শই বিভিন্ন ব্যালেন্স সেটিংসের সাথে তাদের ব্যবহার করে। এবং উভয়ই তাদের গাড়ির মডেলের ভারসাম্যকে "নিরপেক্ষ" বলতে পারে।
গুরুত্বপূর্ণ প্রতিযোগিতার প্রাক্কালে, গাড়ির কিটের KIT সমাবেশ শেষ হওয়ার আগে, দুর্ঘটনার পরে, আংশিক সমাবেশ থেকে একটি গাড়ি কেনার সময় এবং অন্যান্য অনেকগুলি পূর্বাভাসযোগ্য বা স্বতঃস্ফূর্ত ক্ষেত্রে, একটি জরুরী হতে পারে। একটি রেডিও-নিয়ন্ত্রিত গাড়ির জন্য একটি রিমোট কন্ট্রোল কিনতে হবে। কিভাবে পছন্দ মিস না, এবং কি বৈশিষ্ট্য বিশেষ মনোযোগ দেওয়া উচিত? এই আমরা নীচে আপনাকে বলতে হবে ঠিক কি!
রিমোট কন্ট্রোল বিভিন্ন
নিয়ন্ত্রণ সরঞ্জামগুলিতে একটি ট্রান্সমিটার থাকে, যার সাহায্যে মডেলার নিয়ন্ত্রণ কমান্ড পাঠায় এবং গাড়িতে ইনস্টল করা একটি রিসিভার, যা সংকেতটি ধরে, এটি ডিকোড করে এবং অ্যাকুয়েটরদের দ্বারা আরও কার্যকর করার জন্য প্রেরণ করে: সার্ভোস, নিয়ন্ত্রক। আপনি যথাযথ বোতাম টিপুন বা রিমোট কন্ট্রোলে প্রয়োজনীয় ক্রিয়াগুলির সংমিশ্রণ সম্পাদন করার সাথে সাথে গাড়িটি এভাবেই চড়ে, বাঁক নেয়, থামে।
মডেলাররা প্রধানত পিস্তল-টাইপ ট্রান্সমিটার ব্যবহার করে, যখন রিমোটটি পিস্তলের মতো হাতে ধরা হয়। গ্যাস ট্রিগার তর্জনীর নীচে স্থাপন করা হয়। আপনি যখন পিছনে চাপেন (নিজের দিকে), গাড়ি চলে যায়, যদি আপনি সামনে চাপেন, এটি ধীর হয়ে যায় এবং থেমে যায়। যদি কোন বল প্রয়োগ না করা হয়, ট্রিগারটি নিরপেক্ষ (মধ্যম) অবস্থানে ফিরে আসবে। রিমোট কন্ট্রোলের পাশে একটি ছোট চাকা রয়েছে - এটি একটি আলংকারিক উপাদান নয়, তবে সবচেয়ে গুরুত্বপূর্ণ নিয়ন্ত্রণ সরঞ্জাম! এটা দিয়ে, সব বাঁক সঞ্চালিত হয়. চাকা ঘড়ির কাঁটার দিকে ঘুরলে চাকাগুলিকে ডানদিকে ঘুরিয়ে দেয়, ঘড়ির কাঁটার বিপরীত দিকে মডেলটিকে বাম দিকে ঘুরিয়ে দেয়৷
এছাড়াও জয়স্টিক ধরনের ট্রান্সমিটার আছে। তারা দুই হাত দিয়ে ধরে রাখা হয়, এবং নিয়ন্ত্রণ ডান এবং বাম লাঠি দ্বারা তৈরি করা হয়। কিন্তু উচ্চ মানের গাড়ির জন্য এই ধরনের সরঞ্জাম বিরল। এগুলি বেশিরভাগ বায়বীয় যানবাহনে এবং বিরল ক্ষেত্রে - খেলনা রেডিও-নিয়ন্ত্রিত গাড়িগুলিতে পাওয়া যায়।
অতএব, আমরা ইতিমধ্যে একটি গুরুত্বপূর্ণ বিষয় খুঁজে বের করেছি, কীভাবে একটি রেডিও-নিয়ন্ত্রিত গাড়ির জন্য একটি রিমোট কন্ট্রোল বেছে নেওয়া যায় - আমাদের একটি পিস্তল-টাইপ রিমোট কন্ট্রোল দরকার। চলো এগোই.
নির্বাচন করার সময় আপনার কোন বৈশিষ্ট্যগুলিতে মনোযোগ দেওয়া উচিত
যে কোনও মডেল স্টোরে আপনি সাধারণ, বাজেটের সরঞ্জামগুলির পাশাপাশি খুব বহুমুখী, ব্যয়বহুল, পেশাদার থেকে চয়ন করতে পারেন তা সত্ত্বেও, সাধারণ পরামিতিগুলি যেগুলিতে আপনার মনোযোগ দেওয়া উচিত:
- ফ্রিকোয়েন্সি
- হার্ডওয়্যার চ্যানেল
- পরিসর
রেডিও-নিয়ন্ত্রিত গাড়ির রিমোট কন্ট্রোল এবং রিসিভারের মধ্যে যোগাযোগ রেডিও তরঙ্গ ব্যবহার করে সরবরাহ করা হয় এবং এই ক্ষেত্রে প্রধান নির্দেশক হল ক্যারিয়ার ফ্রিকোয়েন্সি। সম্প্রতি, মডেলাররা সক্রিয়ভাবে 2.4 GHz ফ্রিকোয়েন্সি সহ ট্রান্সমিটারগুলিতে স্যুইচ করছে, যেহেতু এটি কার্যত হস্তক্ষেপের জন্য দুর্বল নয়। এটি আপনাকে এক জায়গায় বিপুল সংখ্যক রেডিও-নিয়ন্ত্রিত গাড়ি সংগ্রহ করতে এবং সেগুলিকে একই সাথে চালাতে দেয়, যখন 27 মেগাহার্টজ বা 40 মেগাহার্টজ ফ্রিকোয়েন্সি সহ সরঞ্জামগুলি বিদেশী ডিভাইসের উপস্থিতিতে নেতিবাচক প্রতিক্রিয়া দেখায়। রেডিও সংকেত একে অপরকে ওভারল্যাপ করতে এবং বাধা দিতে পারে, যার ফলে মডেল নিয়ন্ত্রণ হারাতে পারে।
আপনি যদি একটি রেডিও-নিয়ন্ত্রিত গাড়ির জন্য একটি রিমোট কন্ট্রোল কেনার সিদ্ধান্ত নেন, তাহলে আপনি অবশ্যই চ্যানেলের সংখ্যার বিবরণে (2-চ্যানেল, 3CH, ইত্যাদি) ইঙ্গিতটিতে মনোযোগ দেবেন। আমরা নিয়ন্ত্রণ চ্যানেলগুলির বিষয়ে কথা বলছি, প্রতিটি যার মধ্যে একটি মডেলের কর্মের জন্য দায়ী। একটি নিয়ম হিসাবে, একটি গাড়ি চালানোর জন্য দুটি চ্যানেল যথেষ্ট - ইঞ্জিন অপারেশন (গ্যাস / ব্রেক) এবং চলাচলের দিক (বাঁক)। আপনি সাধারণ খেলনা গাড়িগুলি খুঁজে পেতে পারেন, যেখানে তৃতীয় চ্যানেলটি হেডলাইটগুলিতে দূরবর্তী স্যুইচিংয়ের জন্য দায়ী।
 অত্যাধুনিক পেশাদার মডেলগুলিতে, তৃতীয় চ্যানেলটি অভ্যন্তরীণ জ্বলন ইঞ্জিনে মিশ্রণ গঠন নিয়ন্ত্রণ বা ডিফারেনশিয়াল ব্লক করার জন্য।
অত্যাধুনিক পেশাদার মডেলগুলিতে, তৃতীয় চ্যানেলটি অভ্যন্তরীণ জ্বলন ইঞ্জিনে মিশ্রণ গঠন নিয়ন্ত্রণ বা ডিফারেনশিয়াল ব্লক করার জন্য।
এই প্রশ্নটি অনেক নতুনদের জন্য আগ্রহের বিষয়। পর্যাপ্ত পরিসীমা যাতে আপনি একটি প্রশস্ত হল বা রুক্ষ ভূখণ্ডে স্বাচ্ছন্দ্য বোধ করতে পারেন - 100-150 মিটার, তারপর মেশিনটি দৃষ্টি থেকে হারিয়ে যায়। আধুনিক ট্রান্সমিটারের শক্তি 200-300 মিটার দূরত্বে কমান্ড প্রেরণের জন্য যথেষ্ট।
একটি রেডিও-নিয়ন্ত্রিত গাড়ির জন্য একটি উচ্চ-মানের, বাজেট রিমোট কন্ট্রোলের একটি উদাহরণ। এটি একটি 3-চ্যানেল সিস্টেম যা 2.4GHz ব্যান্ডে কাজ করে। তৃতীয় চ্যানেলটি মডেলারের সৃজনশীলতার জন্য আরও সুযোগ দেয় এবং গাড়ির কার্যকারিতা প্রসারিত করে, উদাহরণস্বরূপ, আপনাকে হেডলাইট বা টার্ন সিগন্যাল নিয়ন্ত্রণ করতে দেয়। ট্রান্সমিটারের মেমরিতে, আপনি 10টি ভিন্ন গাড়ির মডেলের জন্য প্রোগ্রাম এবং সেটিংস সংরক্ষণ করতে পারেন!
রেডিও কন্ট্রোলের জগতে বিপ্লবীরা - আপনার গাড়ির জন্য সেরা রিমোট
টেলিমেট্রি সিস্টেমের ব্যবহার রেডিও-নিয়ন্ত্রিত গাড়ির জগতে একটি বাস্তব বিপ্লব হয়ে উঠেছে! মডেলারকে আর অনুমান করার দরকার নেই যে মডেলটি কী গতিতে বিকাশ করছে, অন-বোর্ড ব্যাটারিতে কী ভোল্টেজ রয়েছে, ট্যাঙ্কে কত জ্বালানী অবশিষ্ট রয়েছে, ইঞ্জিনটি কী তাপমাত্রায় উষ্ণ হয়েছে, এটি কতগুলি বিপ্লব ঘটায় ইত্যাদি। প্রচলিত সরঞ্জাম থেকে প্রধান পার্থক্য হল যে সংকেত দুটি দিক থেকে প্রেরণ করা হয়: পাইলট থেকে মডেল এবং টেলিমেট্রি সেন্সর থেকে কনসোলে।
ক্ষুদ্রাকৃতির সেন্সর আপনাকে রিয়েল টাইমে আপনার গাড়ির অবস্থা পর্যবেক্ষণ করতে দেয়। প্রয়োজনীয় ডেটা রিমোট কন্ট্রোল ডিসপ্লে বা পিসি মনিটরে প্রদর্শিত হতে পারে। সম্মত হন, গাড়ির "অভ্যন্তরীণ" অবস্থা সম্পর্কে সর্বদা সচেতন থাকা খুবই সুবিধাজনক। এই ধরনের একটি সিস্টেম সংহত করা সহজ এবং কনফিগার করা সহজ।
 একটি "উন্নত" ধরনের রিমোট কন্ট্রোলের উদাহরণ। অ্যাপা "DSM2" প্রযুক্তিতে কাজ করে, যা সবচেয়ে সঠিক এবং দ্রুত প্রতিক্রিয়া প্রদান করে। অন্যান্য স্বতন্ত্র বৈশিষ্ট্যগুলির মধ্যে রয়েছে একটি বড় স্ক্রীন, যা গ্রাফিকভাবে সেটিংস এবং মডেলের অবস্থার ডেটা সম্প্রচার করে। Spectrum DX3R কে তার ধরণের সবচেয়ে দ্রুততম বলে মনে করা হয় এবং এটি আপনাকে বিজয়ের দিকে নিয়ে যাওয়ার নিশ্চয়তা!
একটি "উন্নত" ধরনের রিমোট কন্ট্রোলের উদাহরণ। অ্যাপা "DSM2" প্রযুক্তিতে কাজ করে, যা সবচেয়ে সঠিক এবং দ্রুত প্রতিক্রিয়া প্রদান করে। অন্যান্য স্বতন্ত্র বৈশিষ্ট্যগুলির মধ্যে রয়েছে একটি বড় স্ক্রীন, যা গ্রাফিকভাবে সেটিংস এবং মডেলের অবস্থার ডেটা সম্প্রচার করে। Spectrum DX3R কে তার ধরণের সবচেয়ে দ্রুততম বলে মনে করা হয় এবং এটি আপনাকে বিজয়ের দিকে নিয়ে যাওয়ার নিশ্চয়তা!
প্ল্যানেট হবি অনলাইন স্টোরে, আপনি সহজেই মডেলগুলি নিয়ন্ত্রণ করার জন্য সরঞ্জাম নির্বাচন করতে পারেন, আপনি একটি রেডিও-নিয়ন্ত্রিত গাড়ি এবং অন্যান্য প্রয়োজনীয় ইলেকট্রনিক্সের জন্য একটি রিমোট কন্ট্রোল কিনতে পারেন:, ইত্যাদি। আপনার পছন্দ সঠিক করুন! আপনি যদি নিজের সিদ্ধান্ত নিতে না পারেন, আমাদের সাথে যোগাযোগ করুন, আমরা সাহায্য করতে পেরে খুশি হব!